Tři společnosti — Vermessungsbüro Rink GbR, Lang&Lang GmbH a ioLabs AG — spojily své síly, aby revolučním způsobem digitalizovaly dálnice prostřednictvím pokročilého 3D skenování, zpracování řízeného umělou inteligencí a modulárních pracovních postupů. Projekt se zaměřuje na transformaci tisíců kilometrů dálnic do přesných, datově bohatých 3D modelů. Díky vysoce přesnému LiDAR skenování, automatizovanému zpracování mračen bodů a feedback smyčkám systém produkuje výstupy připravené pro CAD a GIS s bezprecedentní efektivitou a přesností. Tento inovativní přístup minimalizuje manuální zásahy, umožňuje bezproblémovou integraci s nástroji splňujícími průmyslové standardy a připravuje cestu pro inteligentnější správu infrastruktury.
Přesnost
2-3 mm
Body naskenované z dálnic jsou zachyceny s velkou přesností, což nám umožňuje pracovat na vysoké úrovni detailu.
Nárůst efektivity
95 %
Naším cílem je tempo 10 minut na kilometr.
Délka dálnic
neomezená
Postupné zpracování nám umožňuje rozdělit dlouhé dálnice na zpracovatelné úseky, a tím pádem je celková délka prakticky neomezená.
Vermessungsbüro Rink GbR, Lang&Lang GmbH a ioLabs AG sdílejí vášeň pro chytrá a efektivní řešení a spojily své síly, aby zlepšily stávající pracovní postupy a urychlily a zpřesnily výrobní proces. Cílem je efektivně zpracovat velké objemy dat — tisíce kilometrů úseků dálnic, které je potřeba 3D naskenovat a zdokumentovat — v co nejkratším čase a vyvinout inovativní řešení pro digitální datové modely velkých liniových struktur.
Technický koncept
Jádrem tohoto projektu je využití pokročilých technologií s velkým potenciálem pro automatizaci. 3D skenery Riegl Vux 1Ha jsou schopné sbírat velké množství přesných dat ve velkém měřítku. Ve spojení s AI, která dokáže data třídit, zpracovávat a produkovat, je možné generovat vektorové reprezentace objektů dálnic v různých datových typech.
Skenování
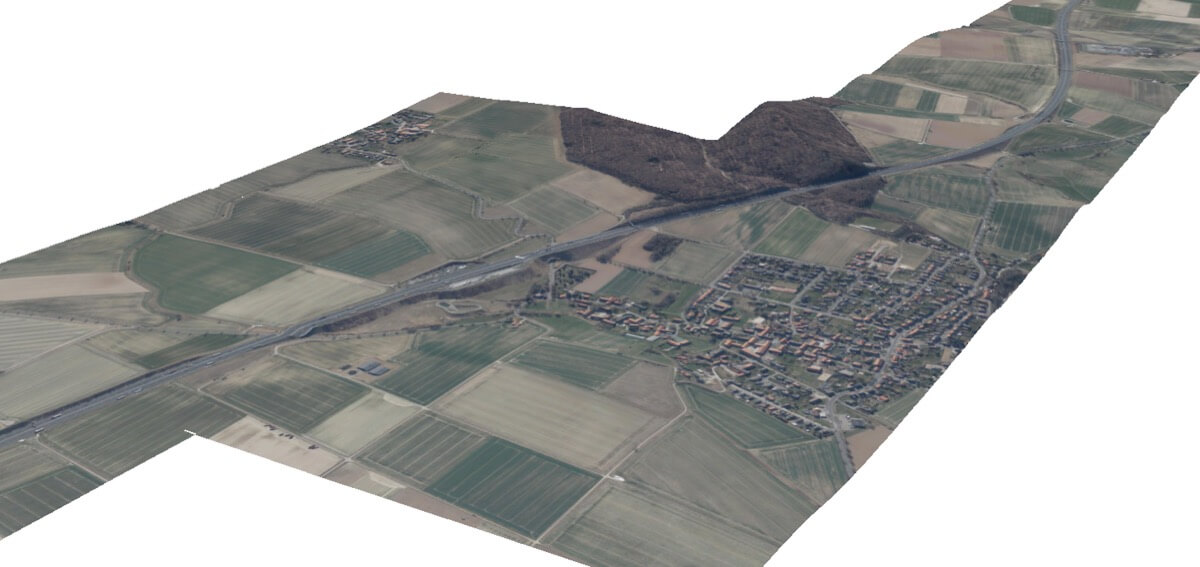
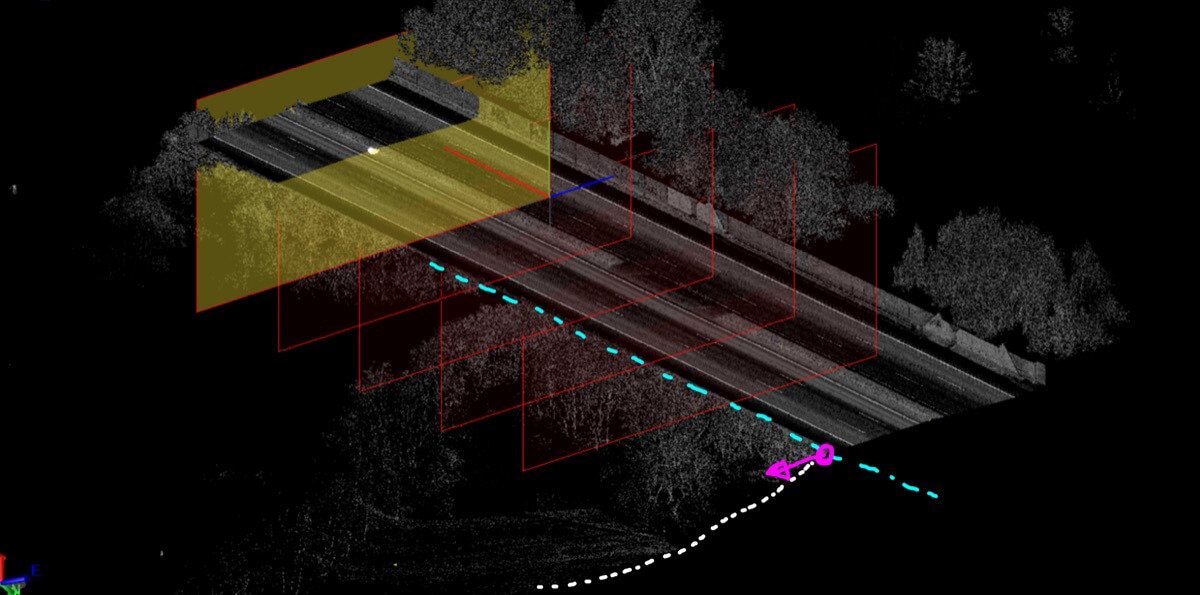
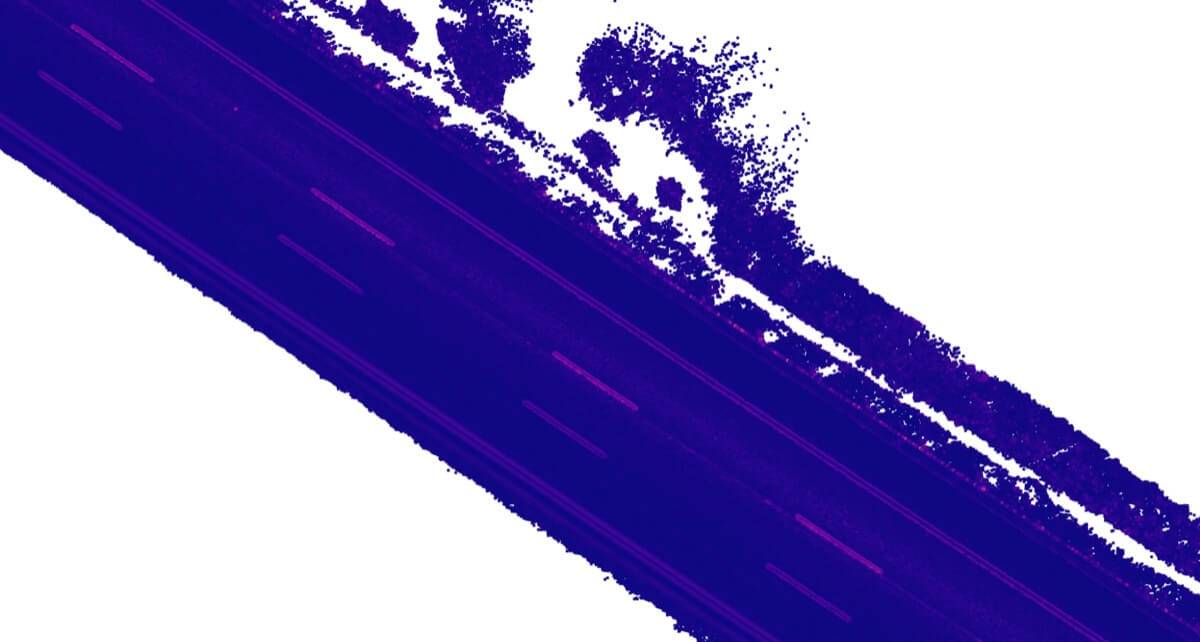
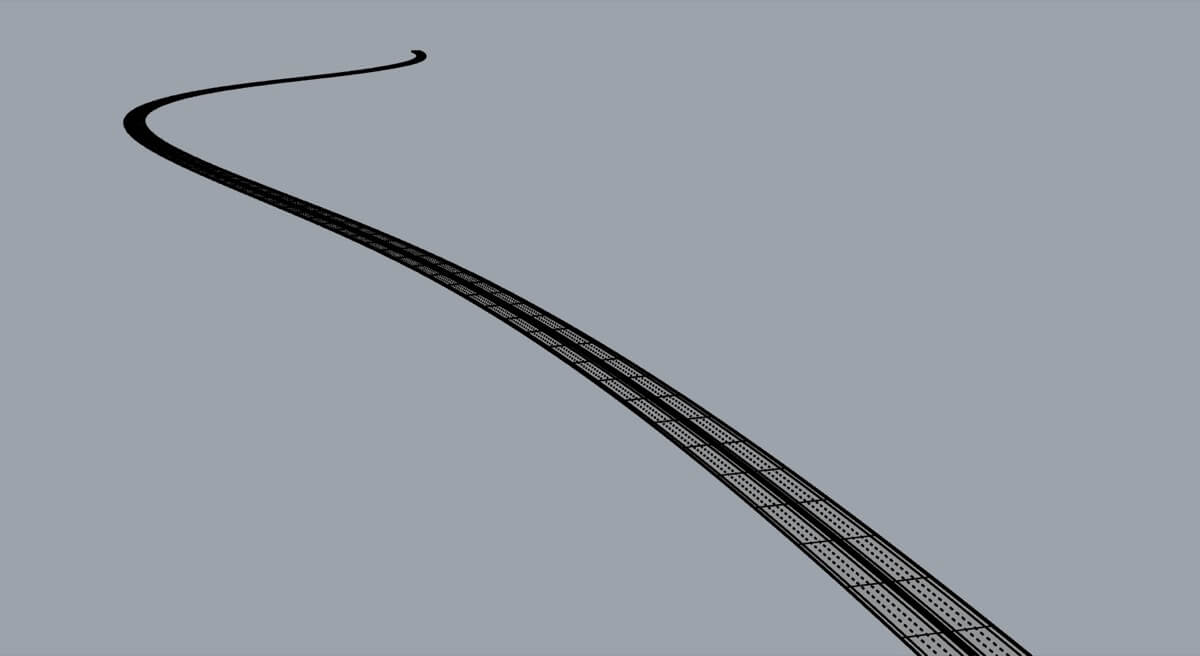
Pro měření dálnic se používá vozidlo s MLS systémem, které projíždí každým pruhem a okrajem silnice pod úhly +30 stupňů a -30 stupňů, aby v mračnech bodů nevznikaly mezery. Surová data jsou georeferencována pomocí kontrolních bodů každých 250 metrů na obou stranách silnice. Kromě skenování pruhů obvykle provádíme 2 lety na každé straně. Vozidlo je kombinováno s průletem dronu nad velkými nebo obtížně přístupnými oblastmi a skenuje je. Data z letu jsou georeferencována pomocí stejných kontrolních bodů jako u MLS systému.
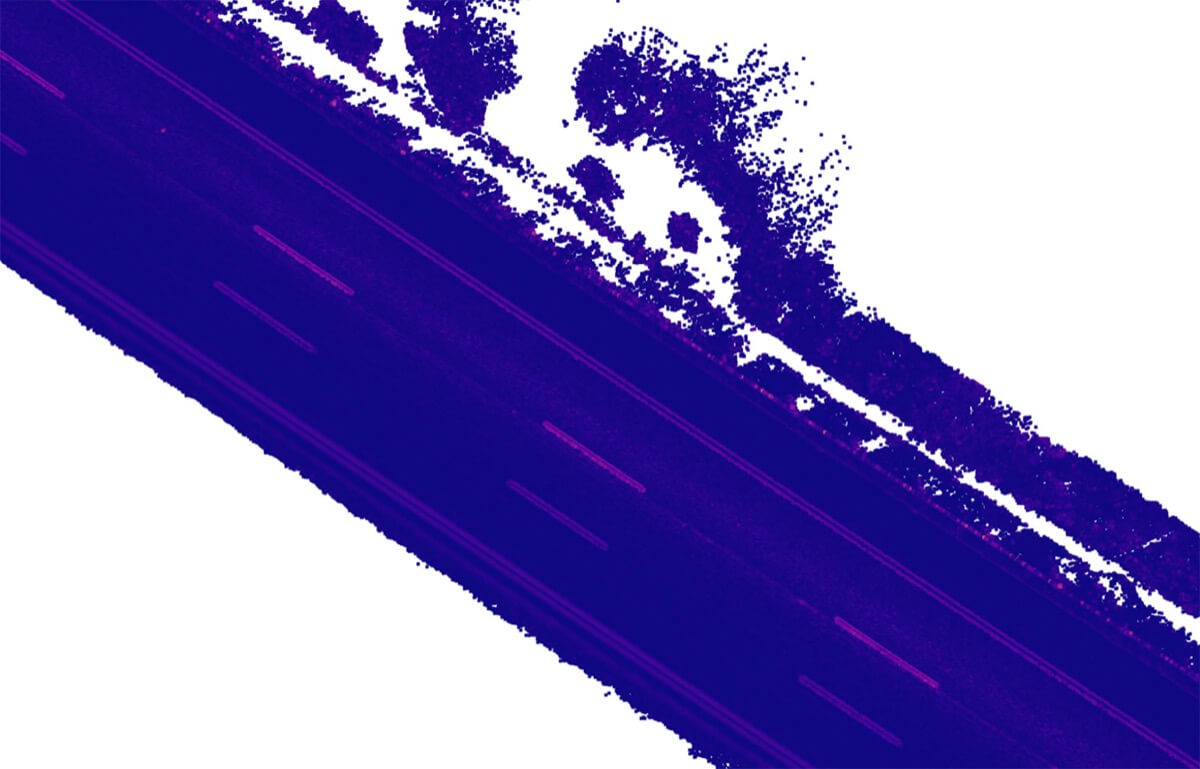
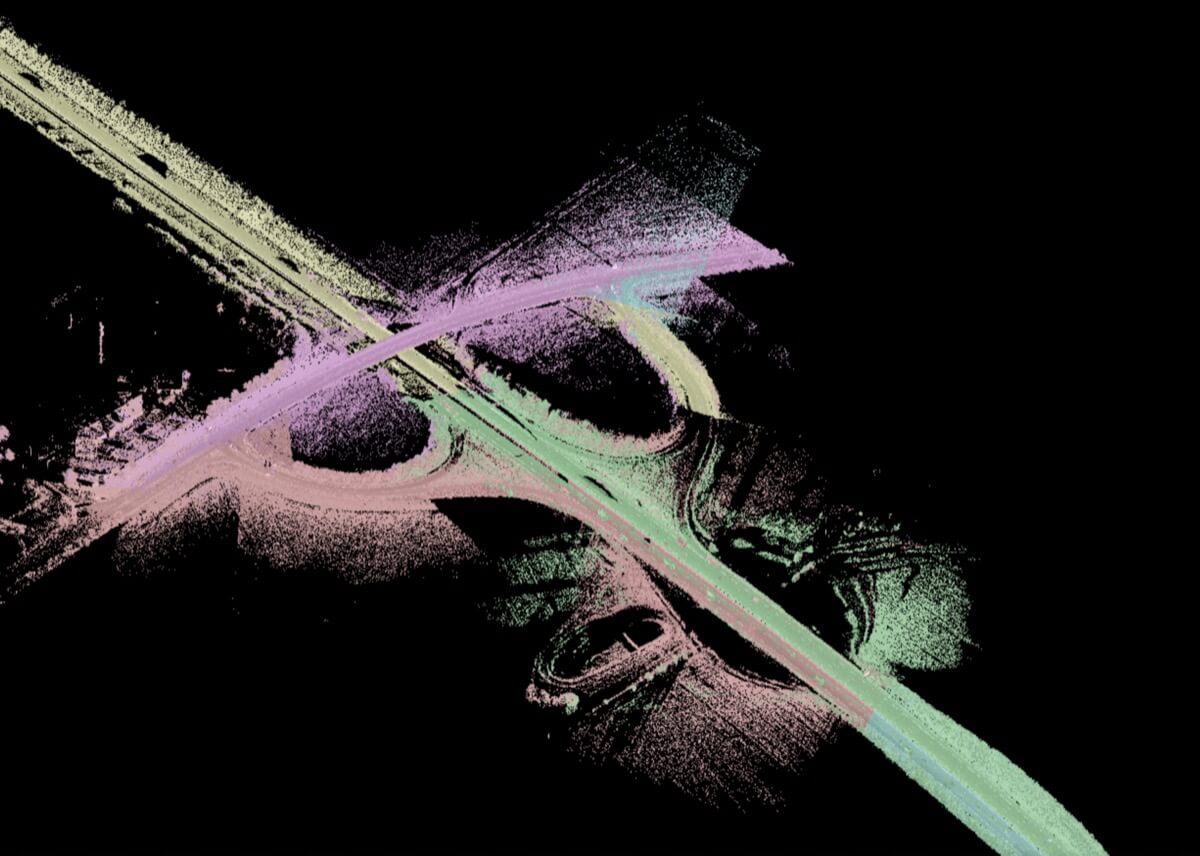
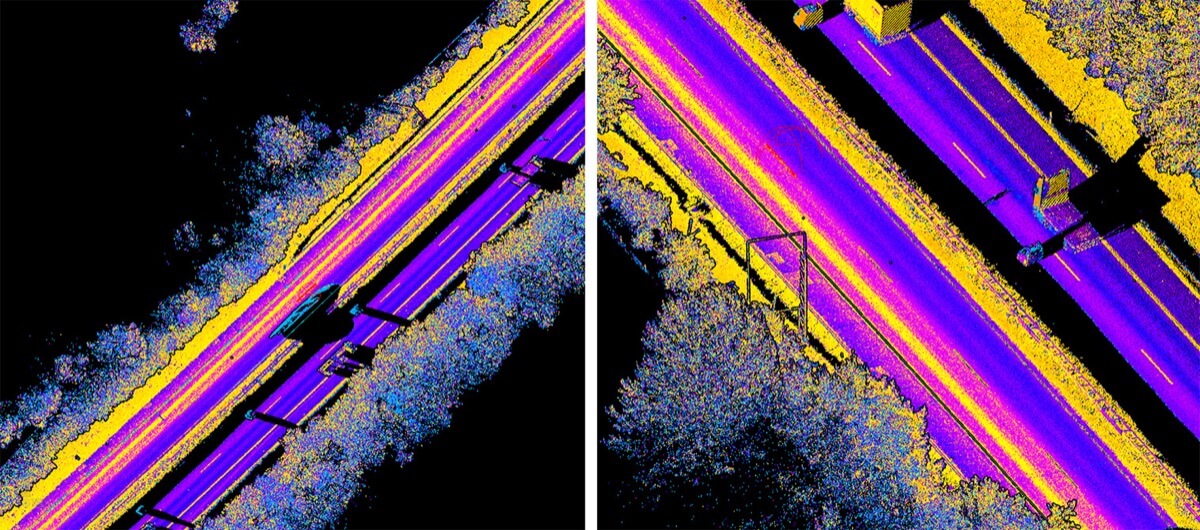
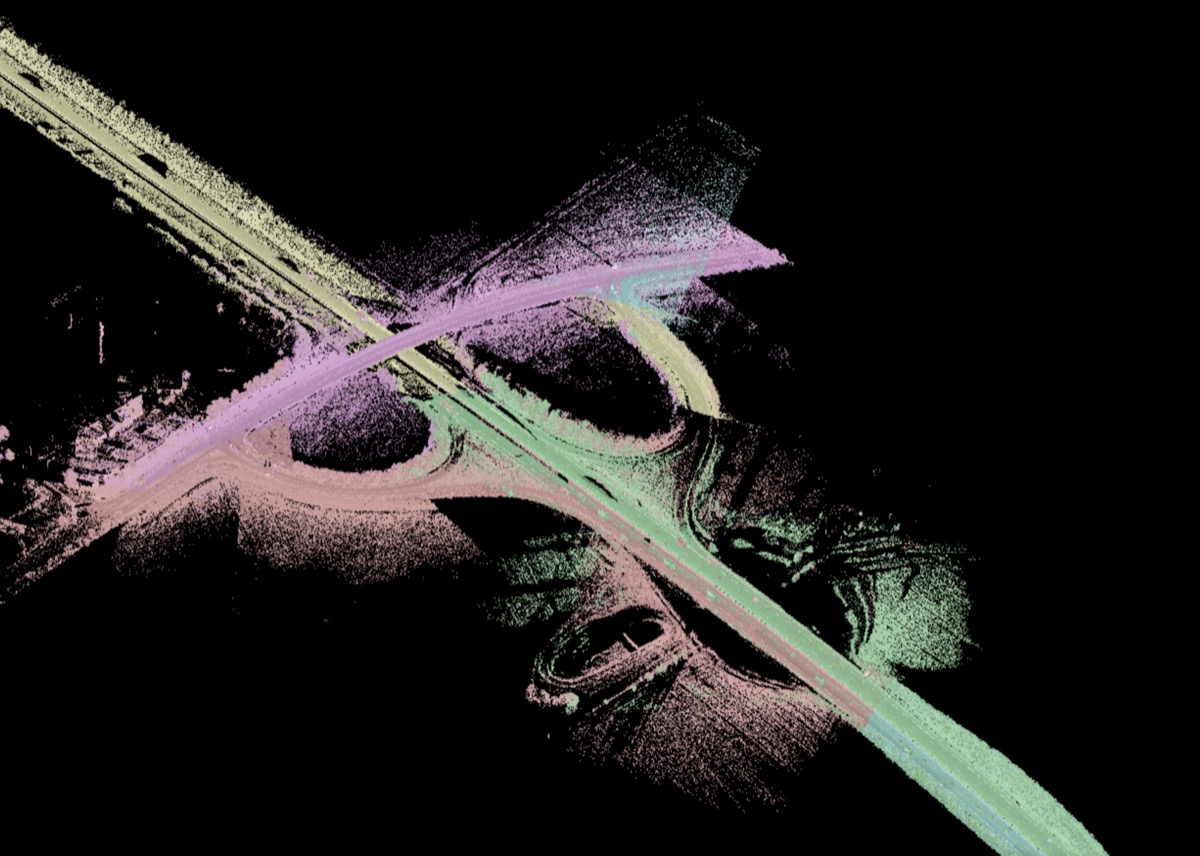
Výsledkem skenování je vysoce přesný soubor mračen bodů ve formátu .las. Skládáním skenů jsou odstraněny nerelevantní, dočasné překážky (např. vozidla) a stínové mezery způsobené sousedními vozidly jsou vyplněny. Tímto způsobem dosahujeme co nejmenších odchylek od skutečných rozměrů objektů.
Automatizované zpracování bodových mraků
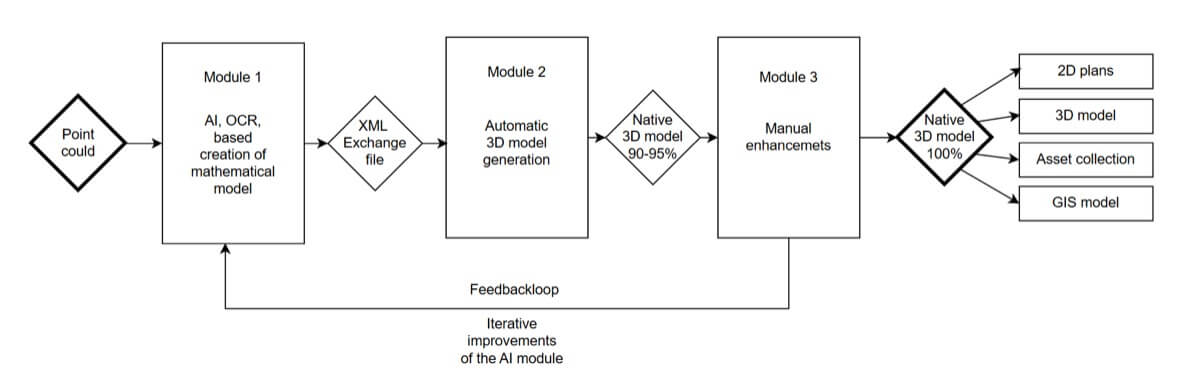
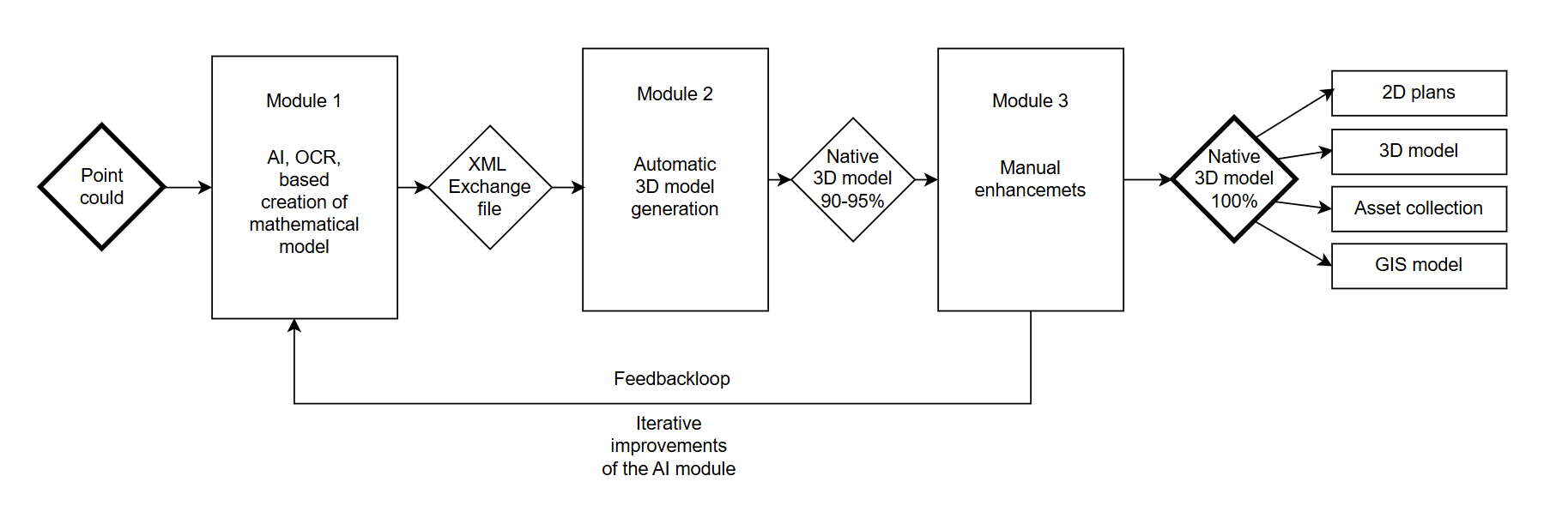
Vstupem našeho nástroje je mračno bodů. Modul 1 zpracovává surový bodový mrak, filtruje nerelevantní části a identifikuje objekty dálnic. Výsledkem Modulu 1 je výměnný soubor, který obsahuje matematické modely objektů dálnic ve formátu XML. Tento soubor slouží jako vstup pro Modul 2, který na základě matematických definic generuje CAD modely. Výsledkem je nativní model s přesností 90-95 %. Obsahuje také označená místa, kde byly nalezeny nedokonalosti. Pro další vylepšení nativního modelu poskytuje Modul 3 možnost zkoumat a opravovat problematické části modelu. Tímto způsobem je dosaženo finálního výsledku, 100% přesného nativního modelu. Prostřednictvím zpětnovazební smyčky jsou nalezené problémy vráceny zpět do Modulu 1, který implementuje výsledky Modulu 3 a zlepšuje své procesy pro budoucí analýzu dat.
Modul 1
Modul 1 se zaměřuje na analýzu dat mračna bodů a vytváření matematického modelu geometrie. To zahrnuje identifikaci a parametrizaci prvků, jako jsou okraje silnic, svodidla a jejich profily, a značení na silnicích (středové a okrajové čáry). Tyto prvky jsou rozpoznány jako přesné typy objektů a přesně kategorizovány.
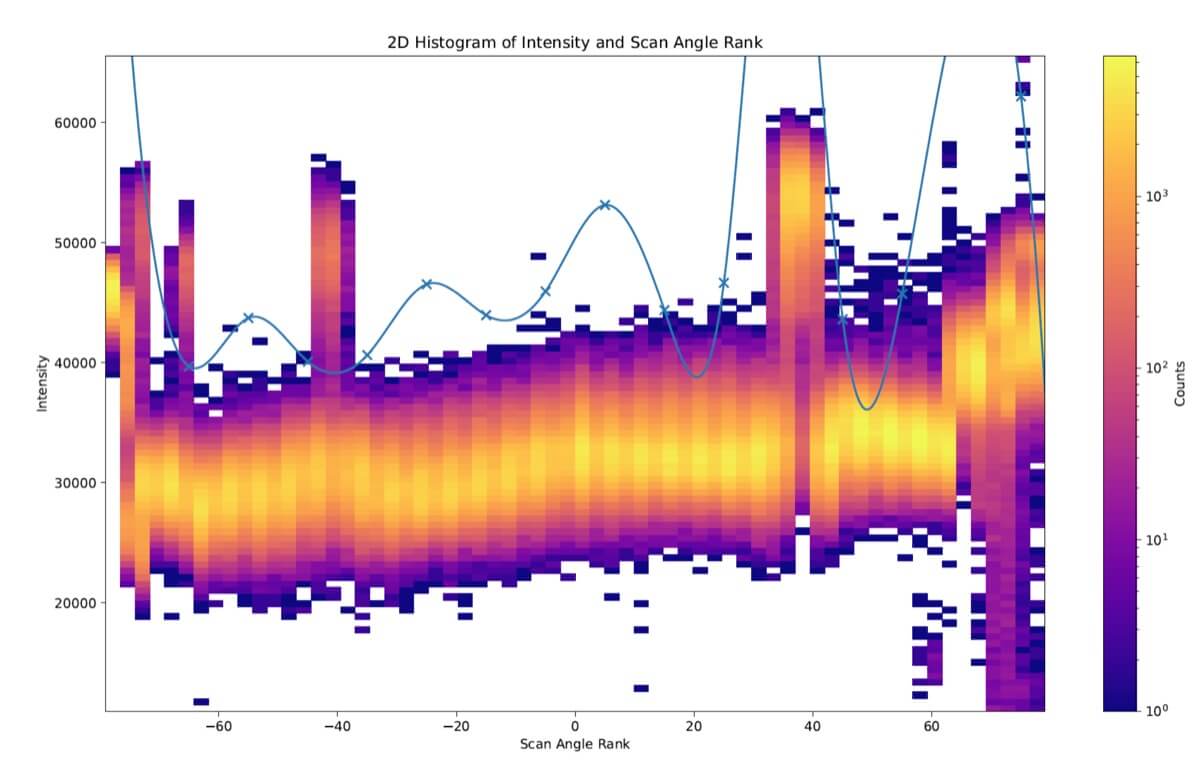
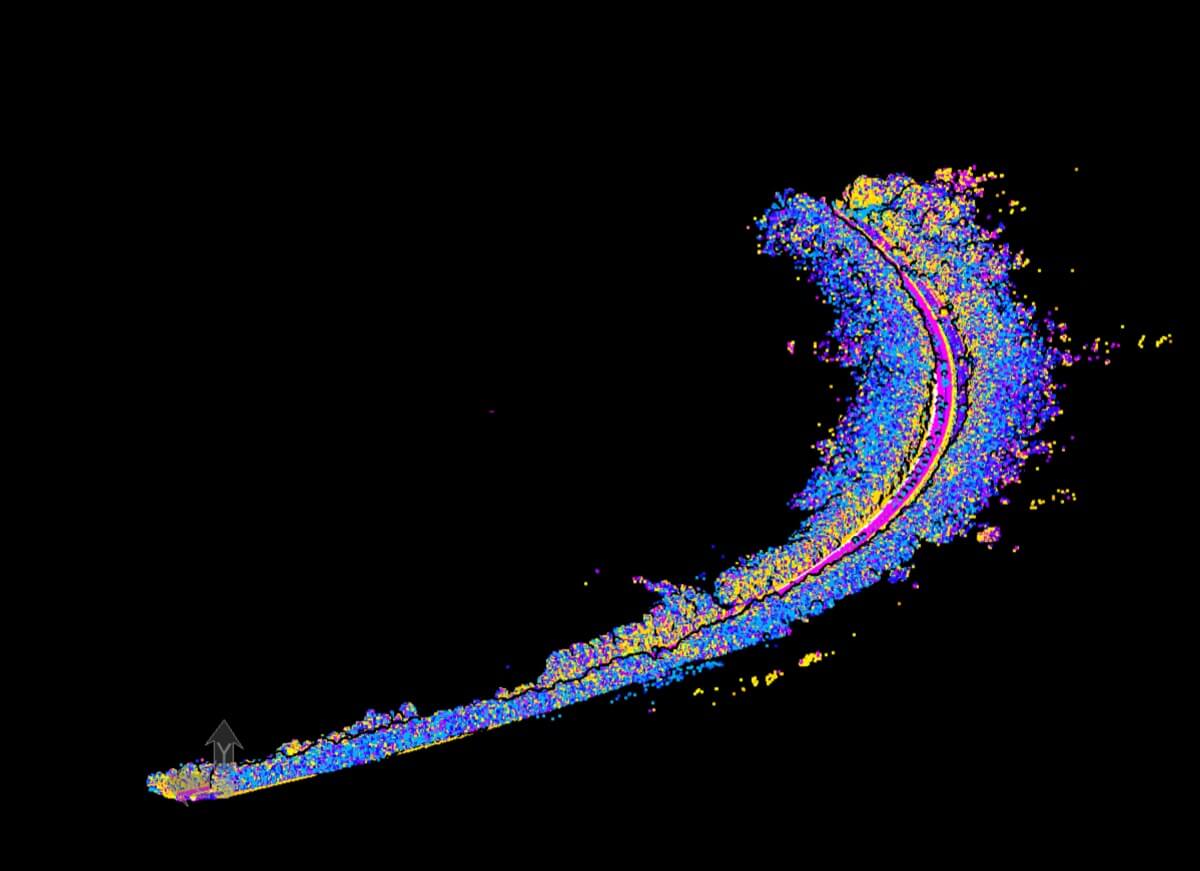
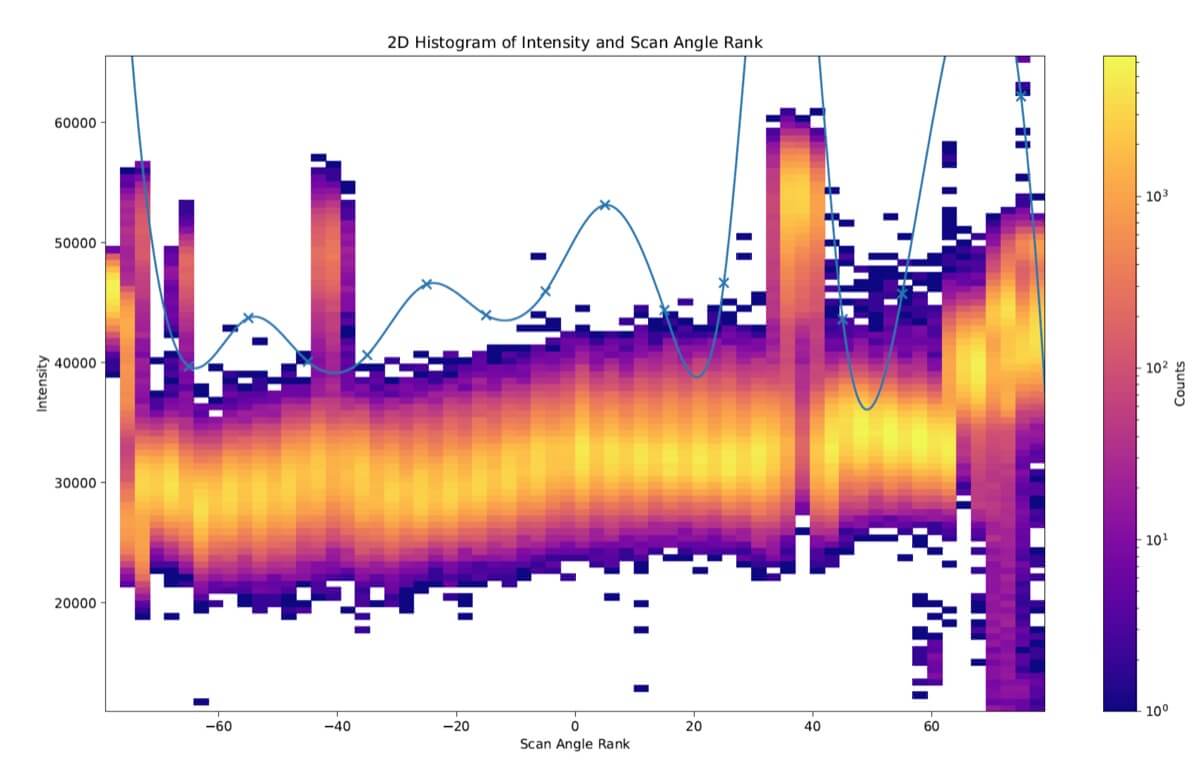
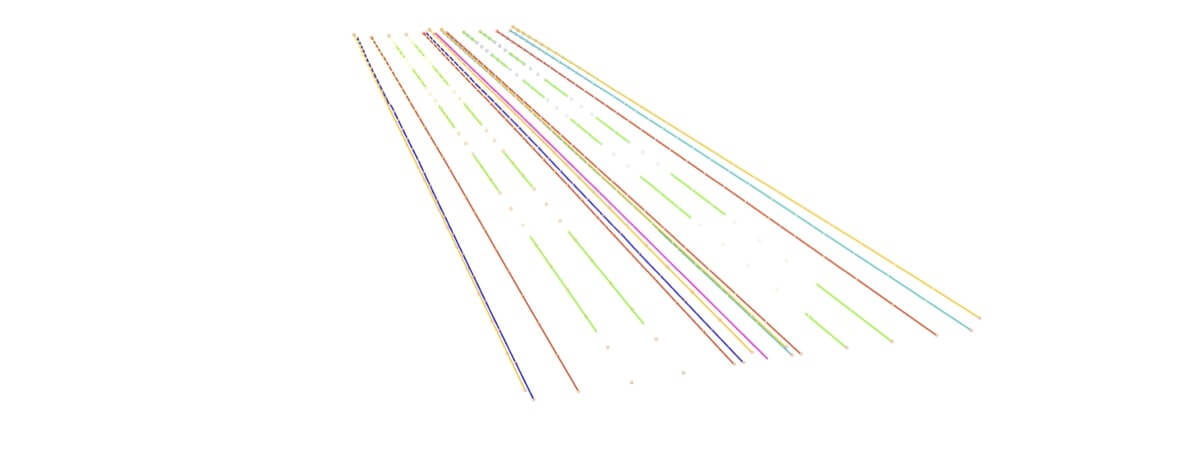
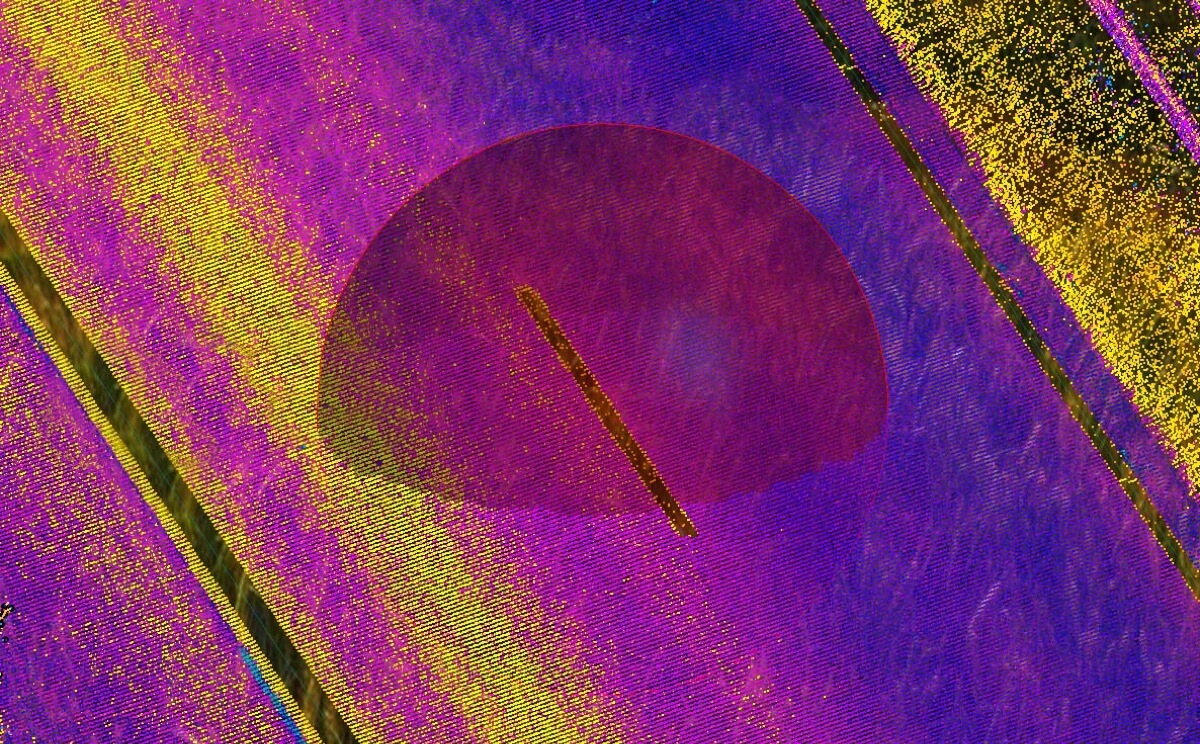
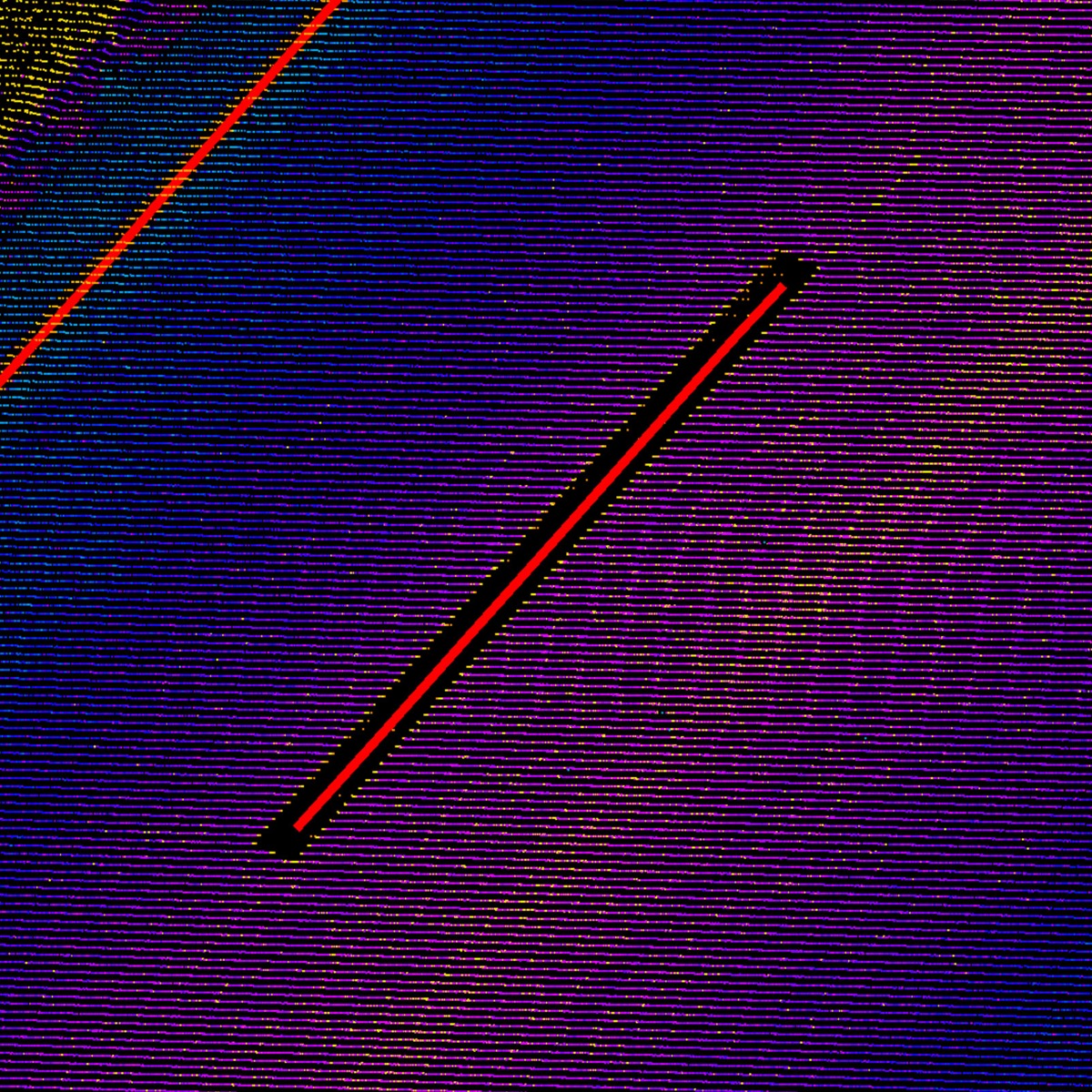
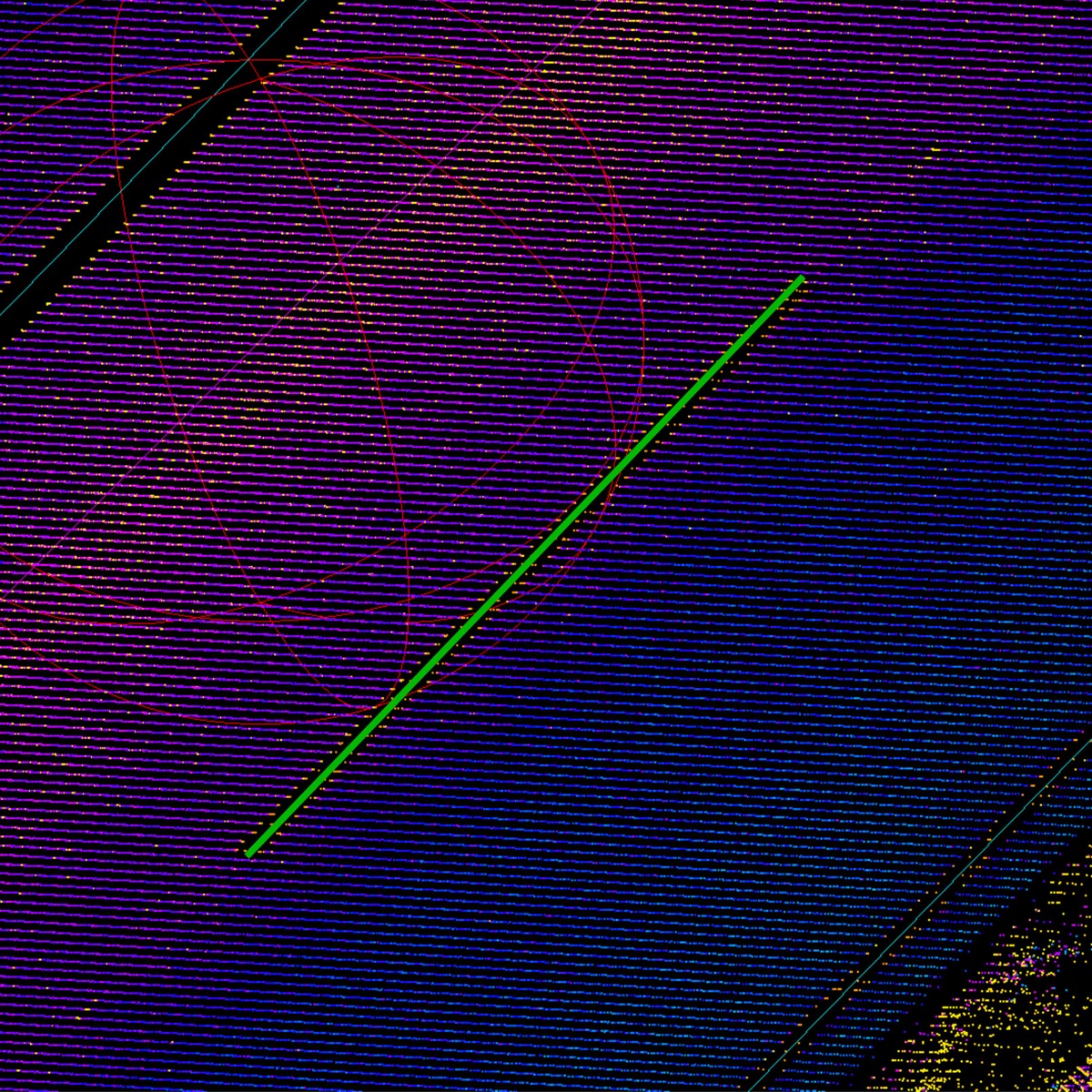
Modul 1 provádí několik po sobě jdoucích kroků. Nejprve identifikuje povrch dálnice pomocí algoritmu RANSAC a tím filtruje relevantní data. Následně jsou body vybírány na základě intenzity. Silniční značení mají vyšší odrazivost ve srovnání s asfaltem, a proto se v bodových mracích LiDAR jeví jako jasnější body. Pomocí analýzy vrcholů oddělujeme jasné body čar v rámci úhlů náběhu LiDAR.
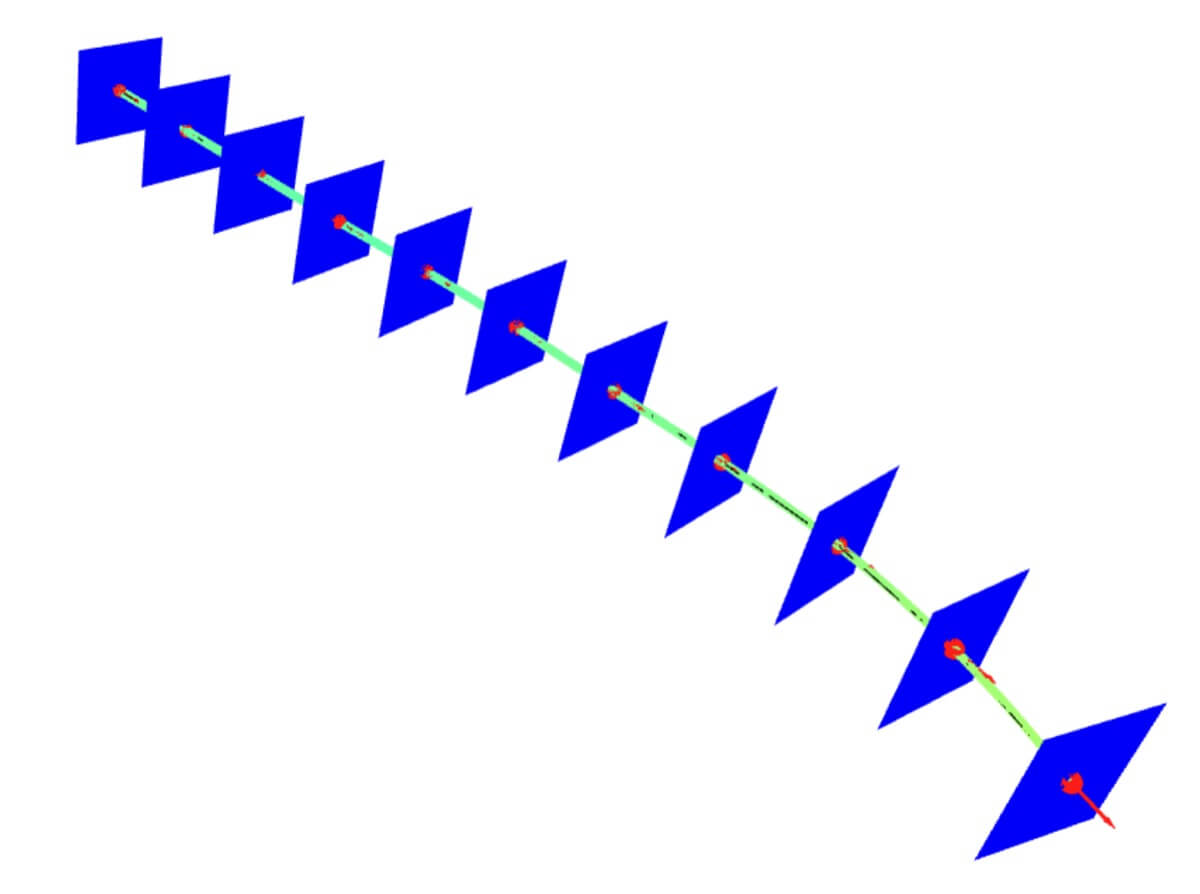
Po těchto počátečních krocích je nutné oddělit jednotlivé objekty. Provede se seskupování (clustering), což znamená vytvoření skupin vysoce reflexivních bodů pomocí algoritmu DBSCAN. Tento proces odděluje jednotlivé čáry do vlastních clusterů. Strojové učení je poté použito k rozpoznání, které clustery patří ke značení na silnicích. Na základě clusterů jízdních pruhů jsou detekovány objekty. Čáry nebo jiné objekty jsou přizpůsobeny spline křivkám, a tím je vytvořen základ pro vektorovou reprezentaci objektů. Používáme modelování založené na agentech (agent-based modelling) pro modelování tvaru jízdního pruhu. Tvary jsou následně zpřesněny – nacházíme přesné hrany detekovaných objektů pro zlepšení přesnosti hrubých tvarů nalezených v předchozích krocích. Strojové učení se rovněž používá k detekci svodidel na několika příčných řezech bodového mraku. Poté přizpůsobujeme tvar svodidel detekovaným polohám, což zajišťuje přesné 3D umístění svodidel.
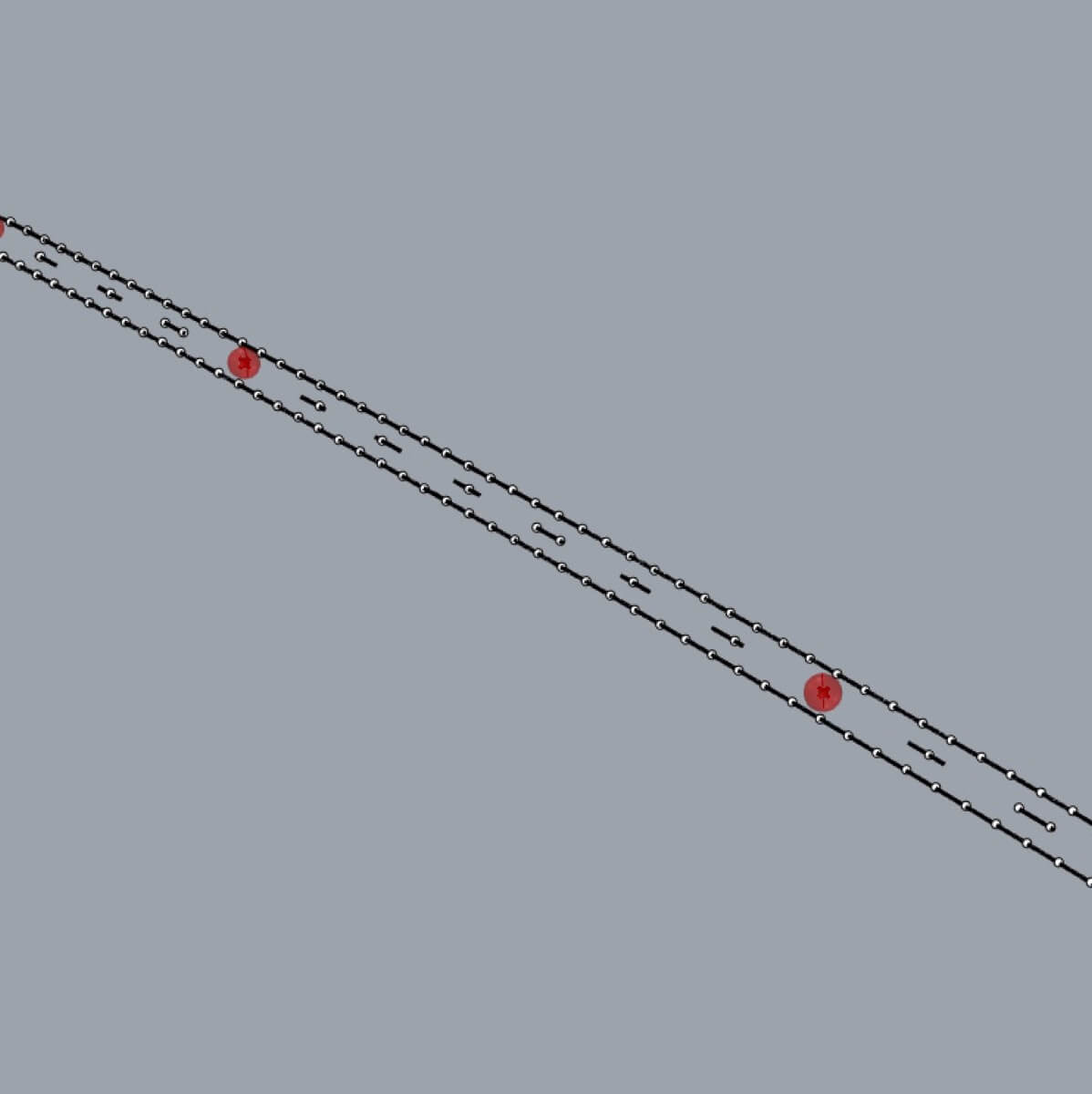
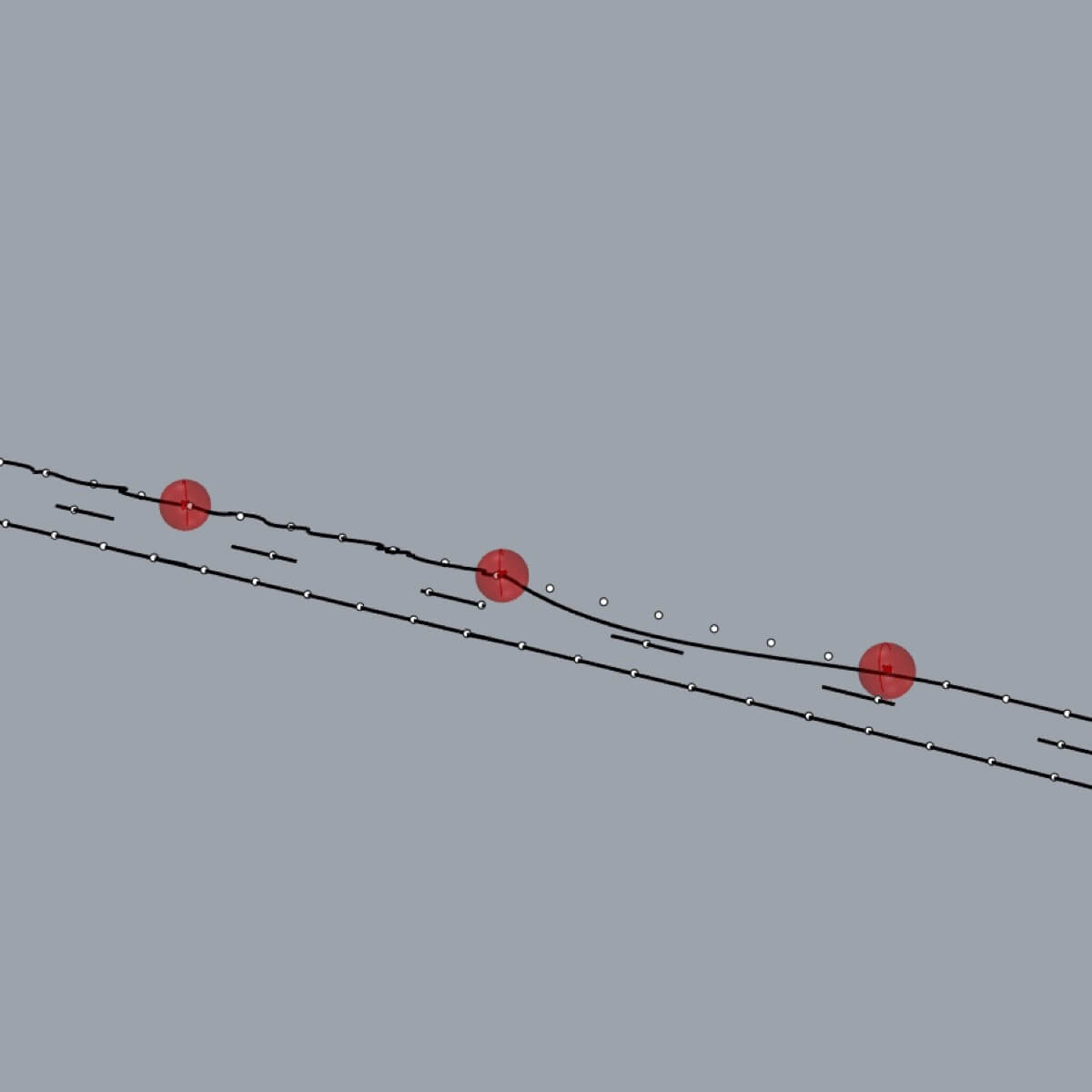
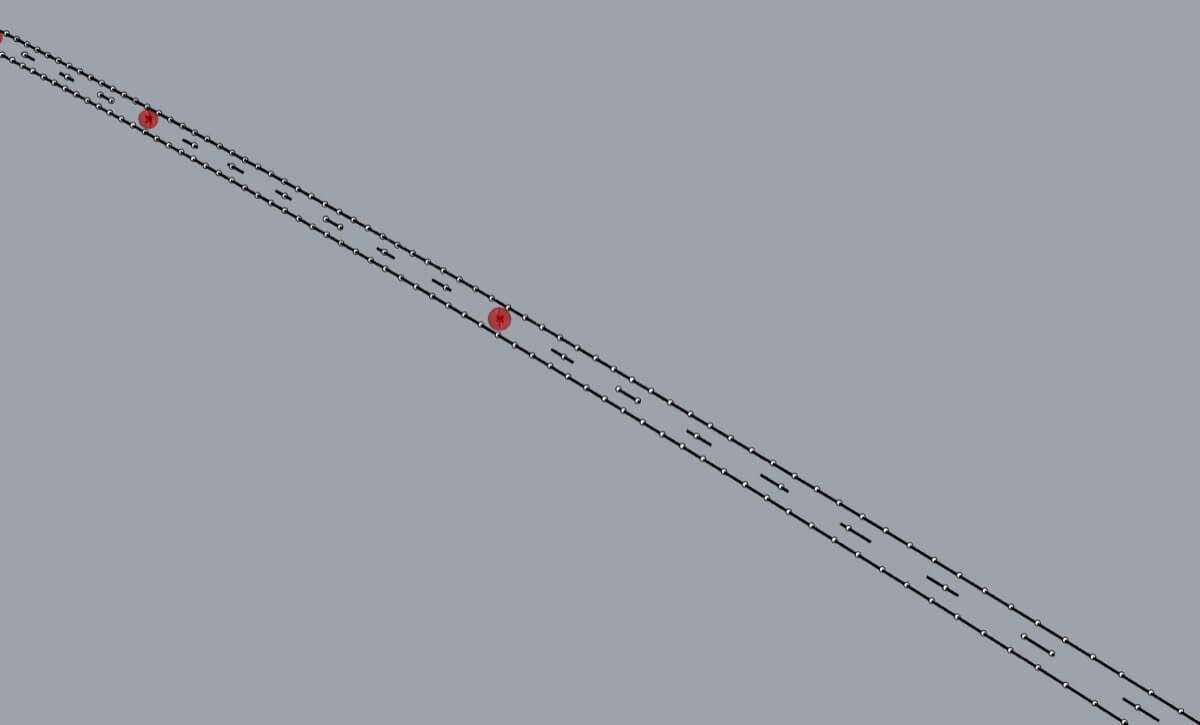
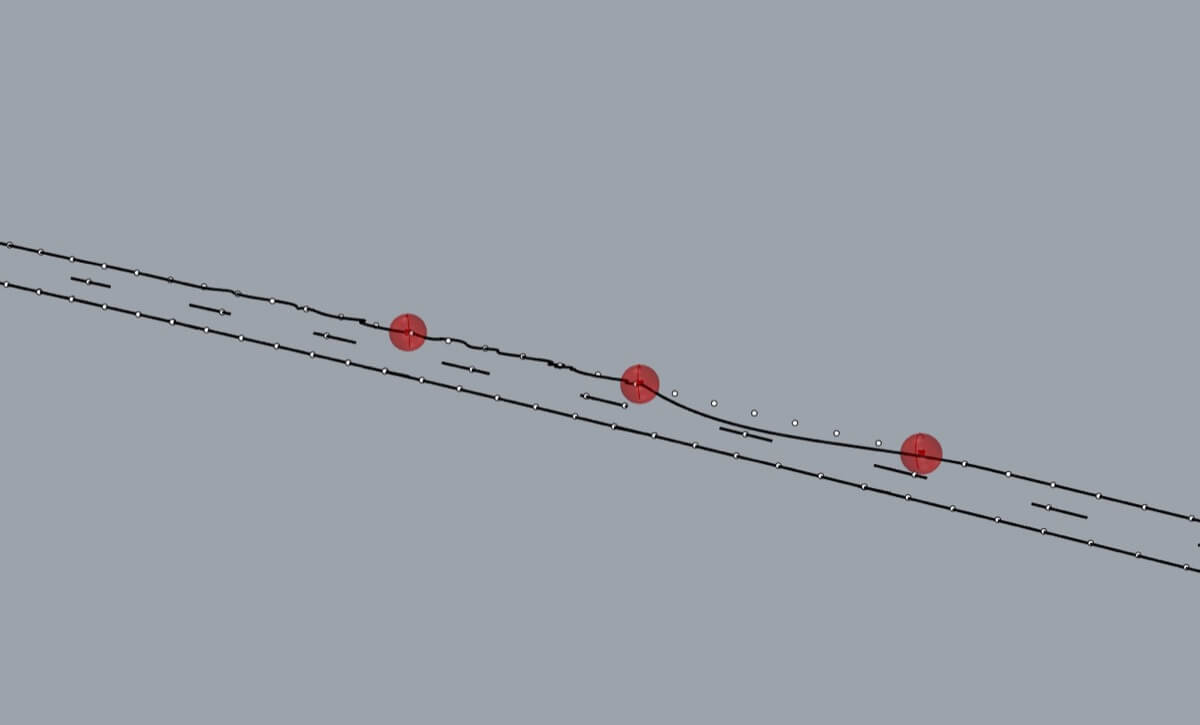
Zpracovaná data jsou formátována do XML výměnného souboru pro snadnou interpretaci následujícími moduly, přičemž každý prvek obsahuje geometrická a sémantická data. Modul 1 také zpřesňuje svůj výstup na základě zpětné vazby z Modulu 3. Části modelu, které nelze s dostatečnou jistotou identifikovat, jsou ve výměnném souboru označeny, aby mohly být vizuálně označeny například červenou, programově umístěnou sférou na problematických místech. Tento vizuální indikátor zvýrazní oblasti vyžadující další pozornost, což umožní Modulu 3 převzít a intenzivněji se zaměřit na konkrétní části.
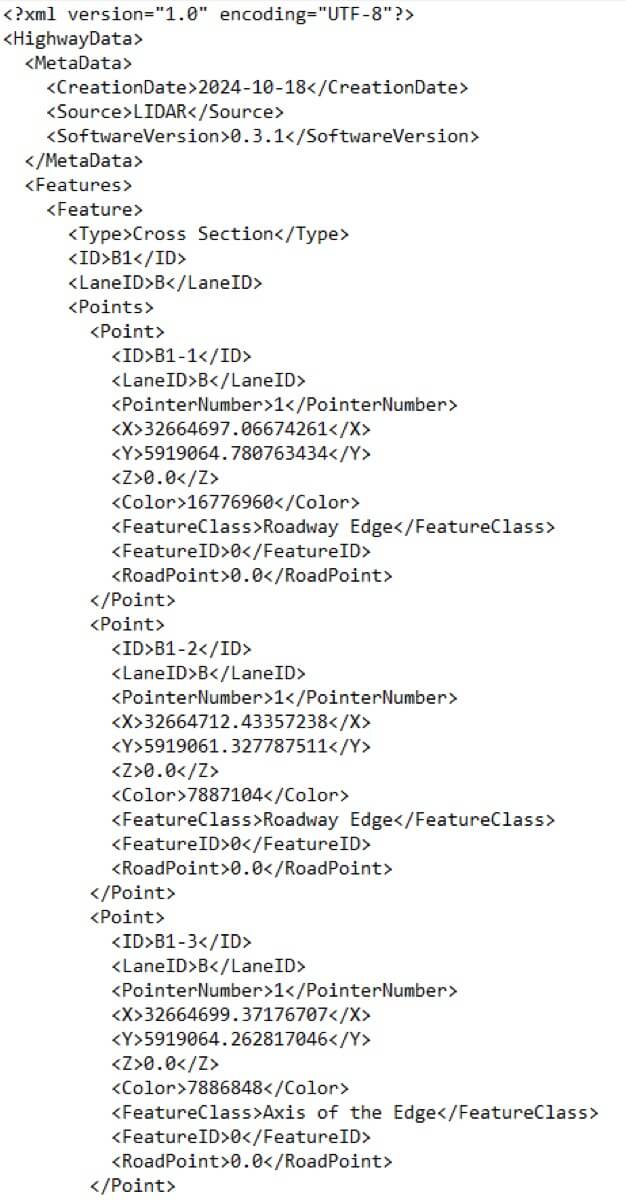
Výměnný soubor
Výměnný soubor, vytvořený Modulem 1, usnadňuje bezproblémovou komunikaci s Modulem 2. Používáme formát XML pro jeho univerzální použitelnost, srozumitelnost a snadnou produkci. Geometrická a sémantická data každého detekovaného prvku jsou organizována do hierarchické struktury, kterou Modul 2 snadno čte, zpracovává a interpretuje.
Modul 2
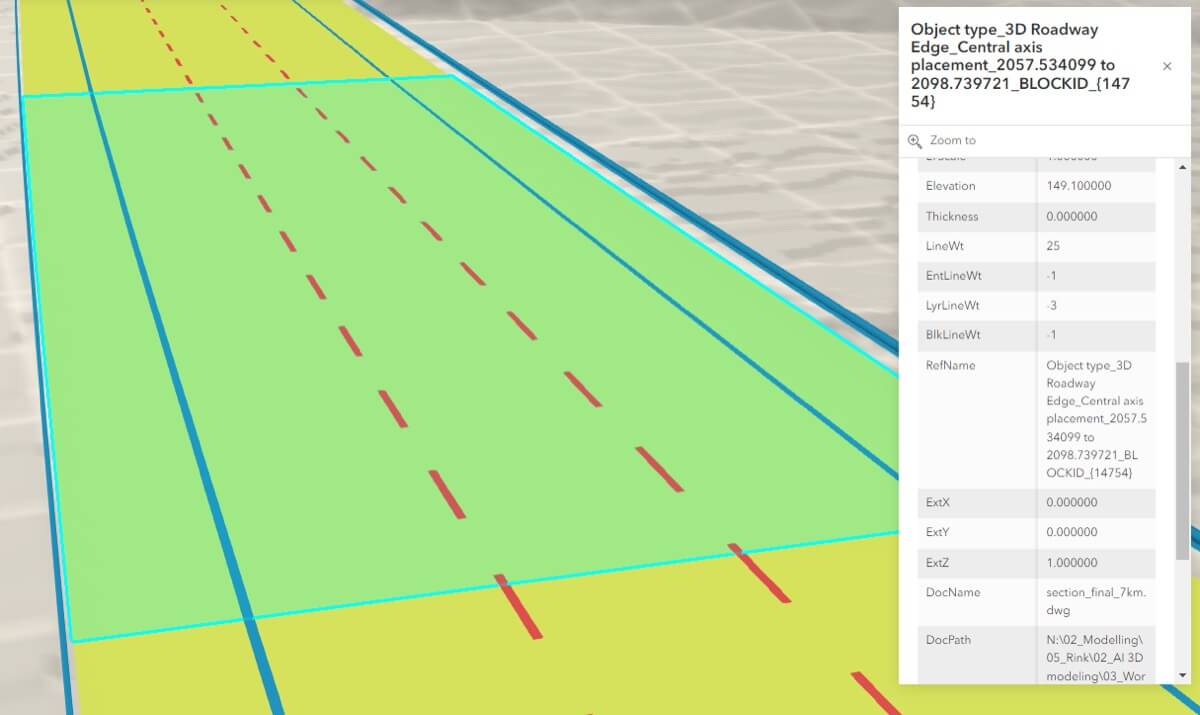
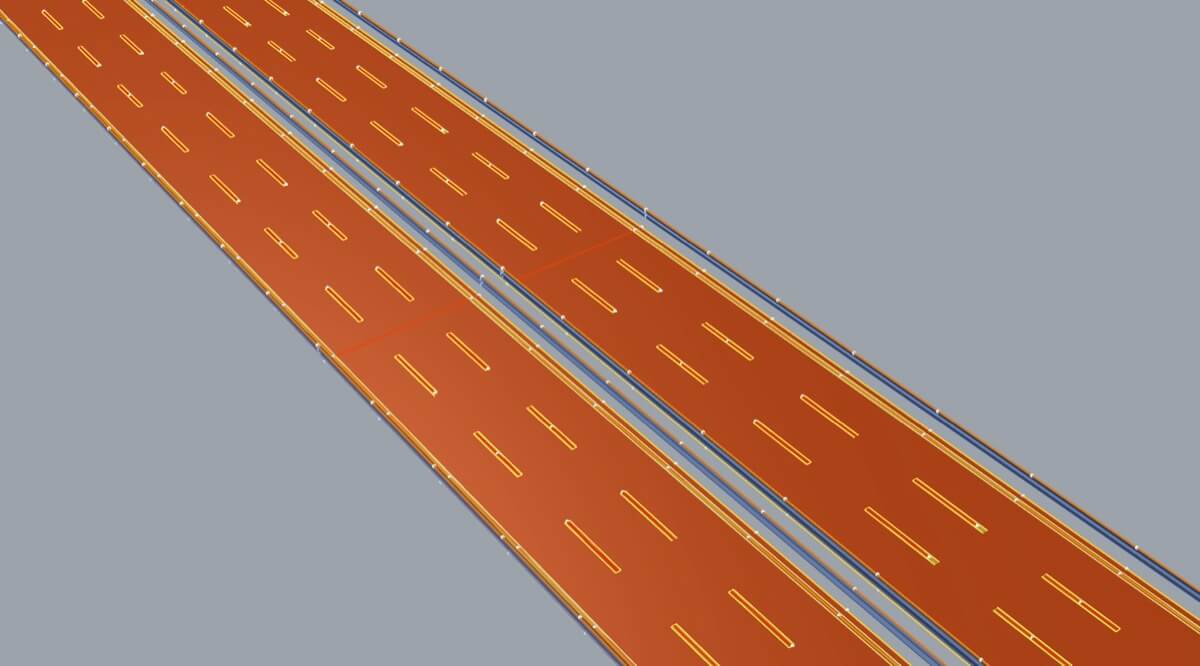
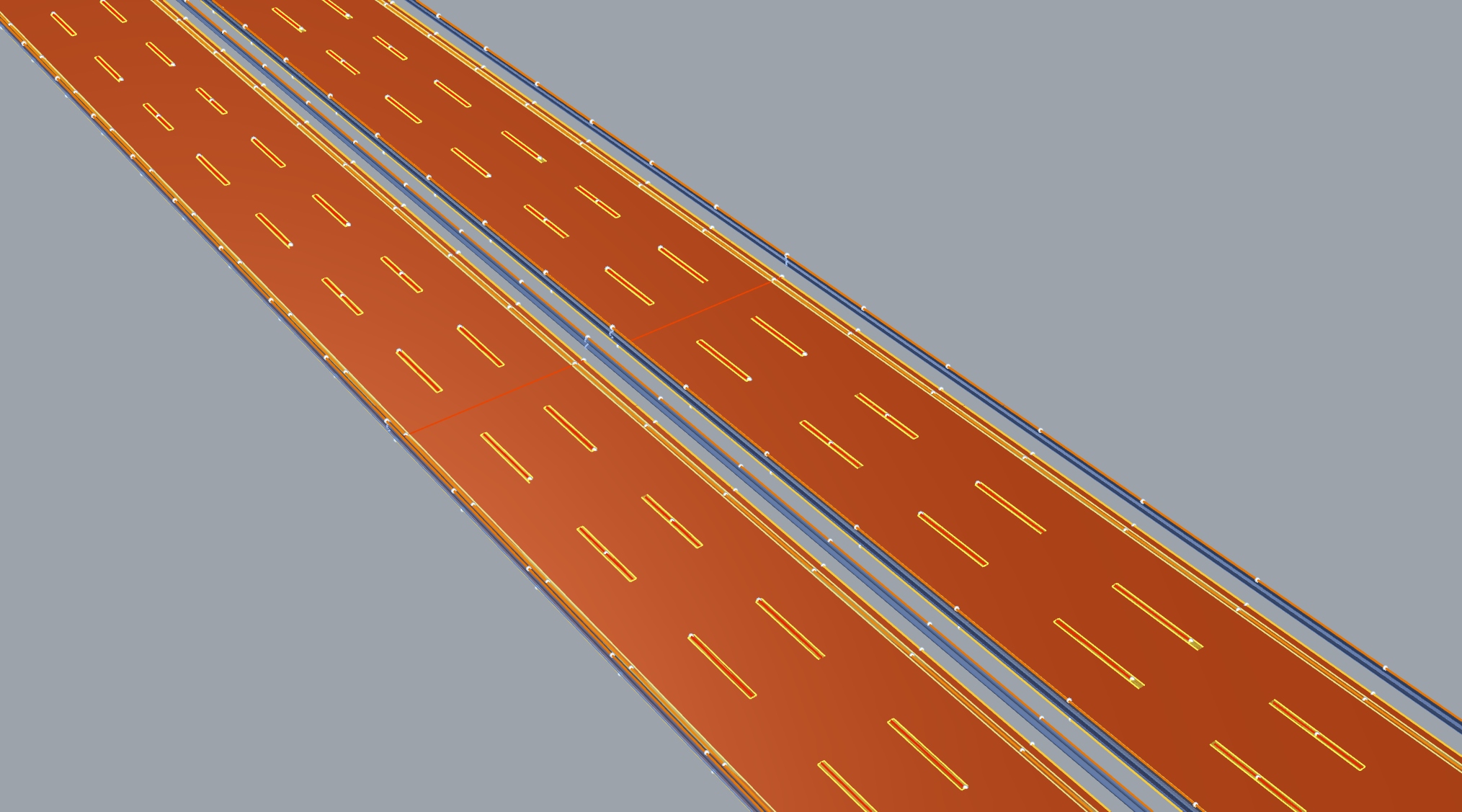
Modul 2 se zaměřuje na zpracování výměnného souboru za účelem vytvoření vektorové geometrie a 3D modelů v nativním softwaru (například Autodesk Revit, Rhinoceros 3D nebo nástroje ESRI). Tyto modely reprezentují požadované prvky a následně jsou exportovány ve formátu jako DWG nebo IFC, obohacené o metadata pro každou jednotlivou komponentu.
Po načtení výměnného souboru jsou data nejprve tříděna podle typu geometrie. Geometrie je následně rekonstruována do skutečných CAD prvků. Nejprve jsou zpracovány lineární prvky a doplněny o požadovaná metadata. Tyto prvky tvoří první část výsledku, ale slouží také jako základ pro složitější, trojrozměrné povrchové prvky, které dále rozšiřují možnosti reprezentace dálnic. Generované 3D povrchy reprezentují povrch vozovky, svodidla nebo značení na silnicích.
Výsledkem Modulu 2 je CAD soubor, který je plně kompatibilní s různými formáty a softwarem CAD a GIS.
Modul 3
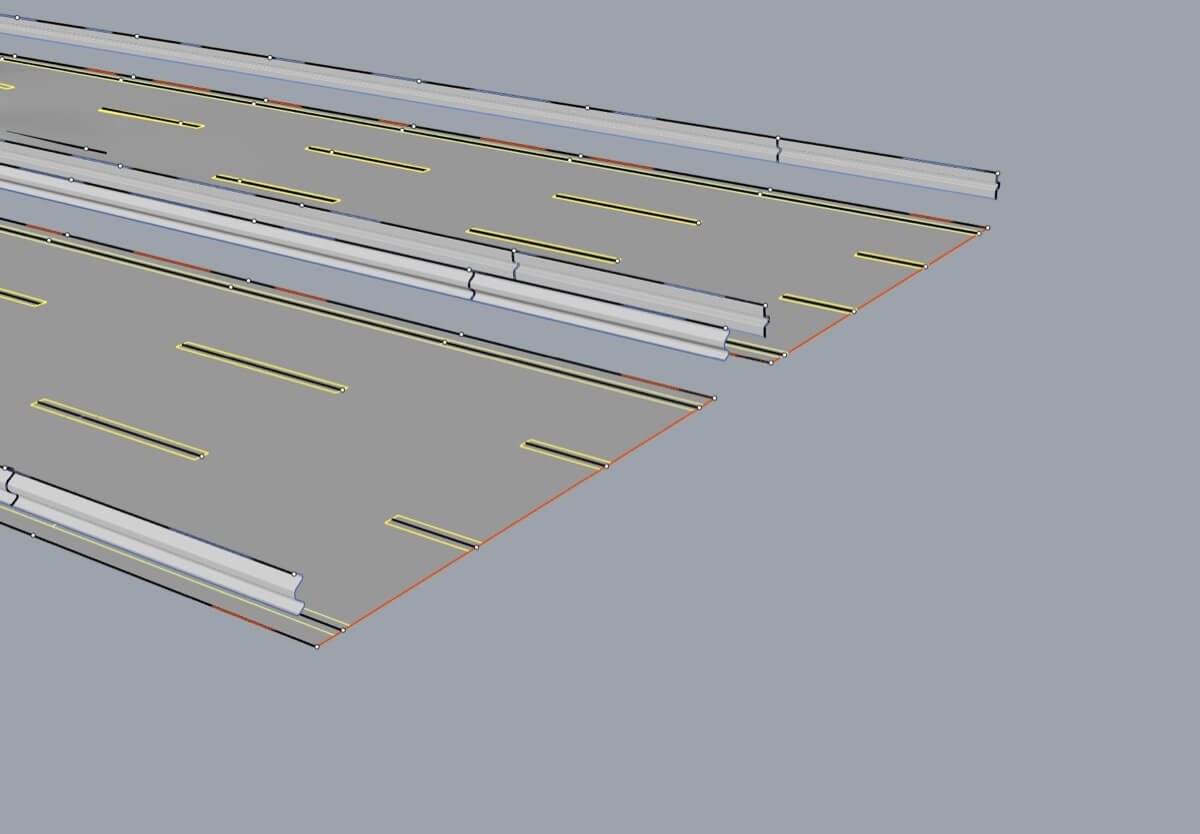
Tento modul je věnován manuálnímu doladění výsledného modelu, zaměřuje se na mezery, které mohly automatizované procesy vynechat a které je potřeba zkontrolovat a případně opravit ručně.
Tento modul 3 začíná s nativním CAD modelem, který obsahuje identifikované mezery. Tyto mezery jsou vizuálně označeny pro snadné použití, což uživatelům umožňuje ručně přidávat, upravovat nebo doplňovat chybějící či nepřesné prvky. Tento manuální přístup, kombinovaný s automatickou feedback smyčkou, zlepšuje přesnost předchozích modulů, zejména Modulu 1.
Konečným výstupem je plně komplexní, bezchybný CAD model, přičemž každý prvek obsahuje geometrická a sémantická data. Výsledný model je kompatibilní s různými formáty a softwary CAD a GIS.
Klíčovou vlastností Modulu 3 je jeho dynamická zpětnovazební smyčka. Když uživatel manuálně upraví výsledek Modulu 2 (například chybějící značení na silnici), systém automaticky aktualizuje a zlepšuje svůj proces tvorby modelu. Tím Modul 3 lépe rozpoznává objekty v budoucích procesech, čímž zvyšuje svou přesnost. Tento kontinuální proces učení zvyšuje přesnost a minimalizuje manuální úpravy v průběhu času, což systému umožňuje stát se efektivnějším a samo-zlepšujícím se s každým použitím.
Věnujeme se i identifikaci případů použití, kde může AI výrazně urychlit proces vytváření a doladění geometrických modelů. I když primárním cílem nástroje není plně implementovat tato AI řešení, identifikace takových možností může přinést výhody efektivity zpracování modelů nad rámec okamžitých cílů tohoto nástroje. Například AI by mohla být použita při extrahování geometrie z bodového mraku v Modulu 1 nebo během manuálního doladění.
Klíčové vlastnosti
-
"Jedním stiskem tlačítka" – řešení vyžadující minimální externí zásahy
-
Efektivita – Velké množství dat je zpracováno v minimálním čase, což výrazně snižuje dobu zpracování.
-
Kompatibilita – Vstupní i výstupní data jsou kompatibilní se širokou škálou průmyslových standardů datových typů a nástrojů.
-
Zpracovatelnost – Výsledek lze zpracovat v dalších nástrojích CAD a GIS, které umožňují správu požadovaných dat.
Výsledek
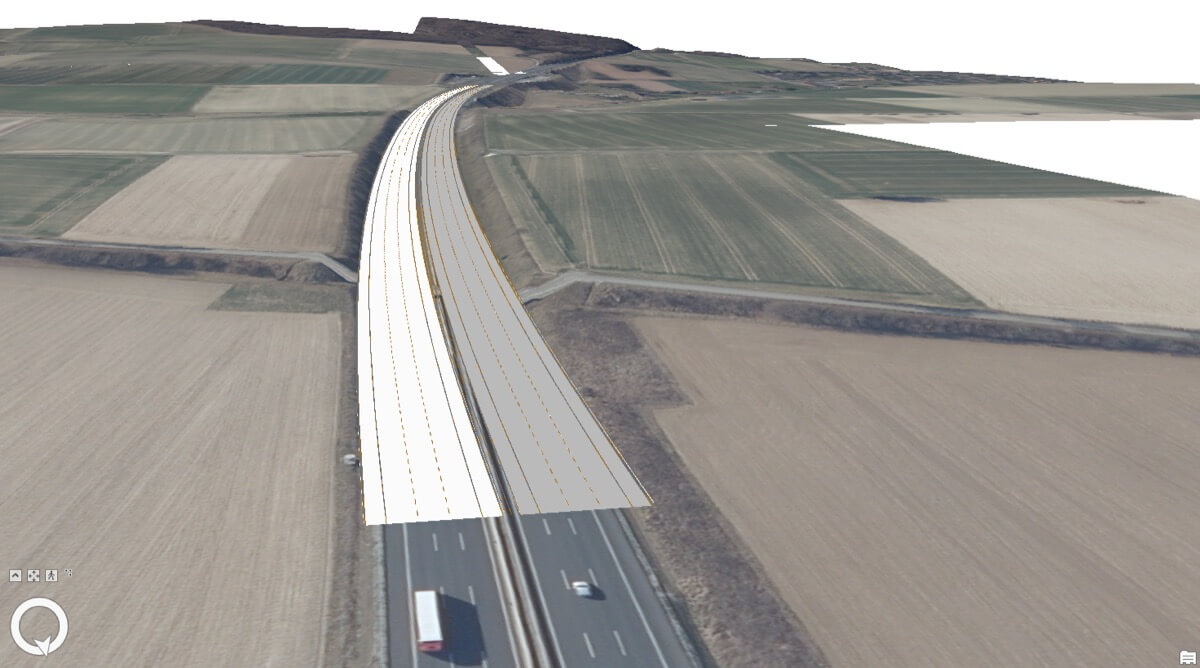
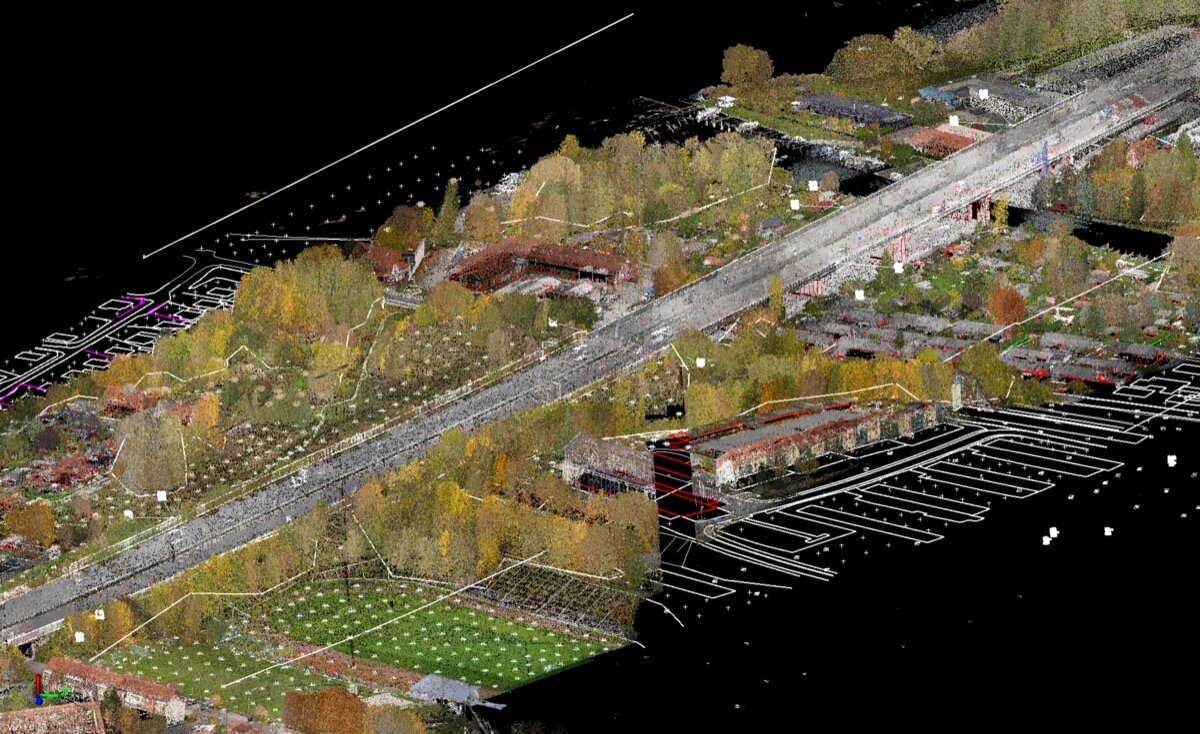
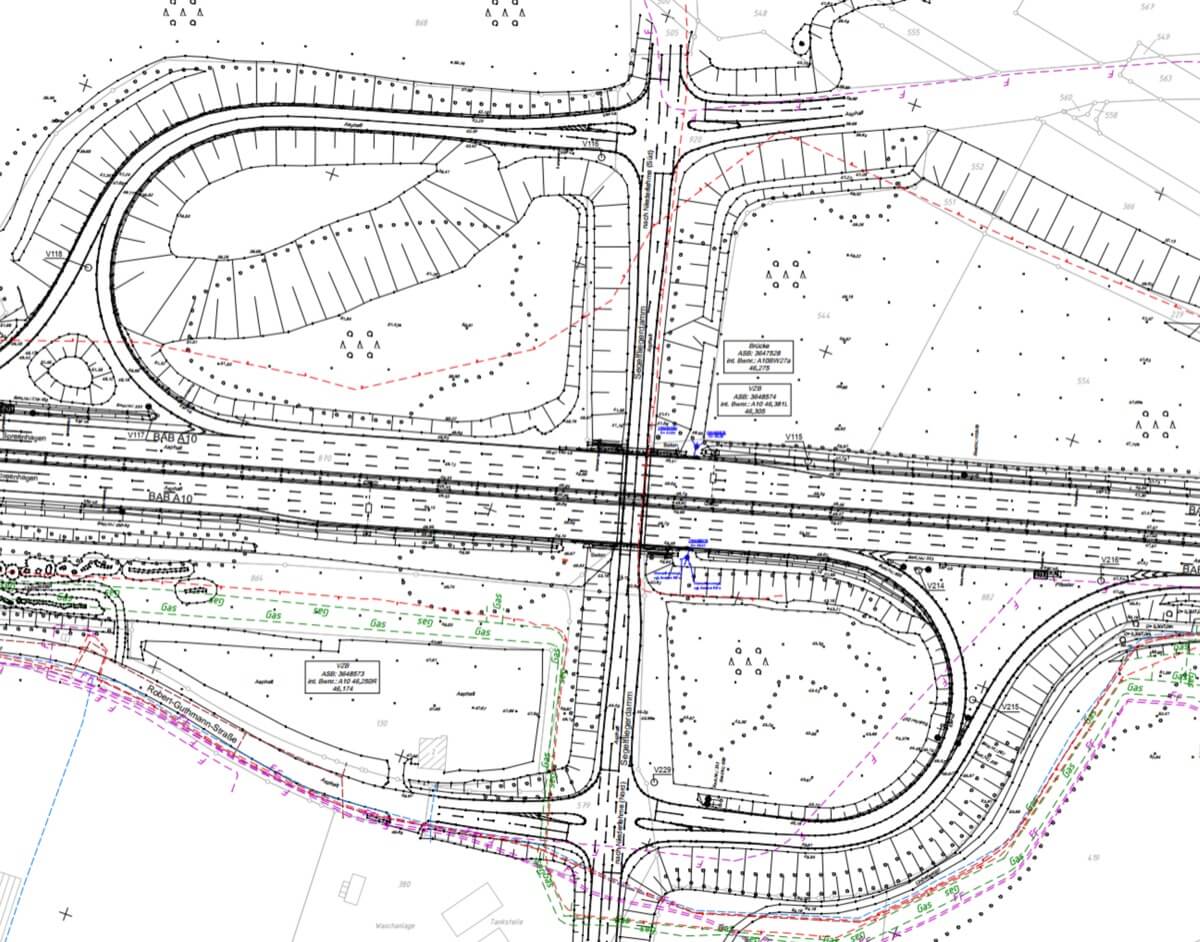
Po dokončení všech popsaných kroků existuje řada možností výstupu. Vytváříme přesné 3D modely se všemi definovanými prvky na svém místě a správným georeferencingem. Naše modely obsahují všechna potřebná data, která lze použít v průběhu procesu. 3D modely jsou také konvertovány do vysoce kvalitních GIS dat, což umožňuje vytváření velkoobjemových modelů, které lze doplnit o další GIS vrstvy, jako je terén nebo různé typy map. Generovaná geometrie je také převedena na 2D plány pro konvenčnější použití.
 Další software
Další software
 ioLabs Tools
ioLabs Tools
Jelikož dálnice jsou velmi dlouhé, kontinuální objekty, zpracování takové velké struktury může být problematické. Naším řešením tohoto problému je postupné zpracování modelu. Je rozdělen na krátké, výkonnostně zvládnutelné úseky, které jsou zpracovány jeden po druhém. Tímto způsobem je celková délka modelu dálnic prakticky neomezená, protože je vždy zpracovávána v samostatných částech a později spojována dohromady.
Závěr
V tomto projektu pracujeme s velmi vysokou přesností a podařilo se nám digitalizovat dálnici od základu až po finální datové modely. Jsme schopni sbírat přesná 3D bodová data jako základ tohoto projektu a převádět je do matematických modelů. S matematickým modelem jsme schopni vytvořit definice 3D souborů a generovat samotnou 3D geometrie. Jako finální produkt můžeme poskytovat data, která jsou kompatibilní s jakoukoliv technologií BIM a GIS.
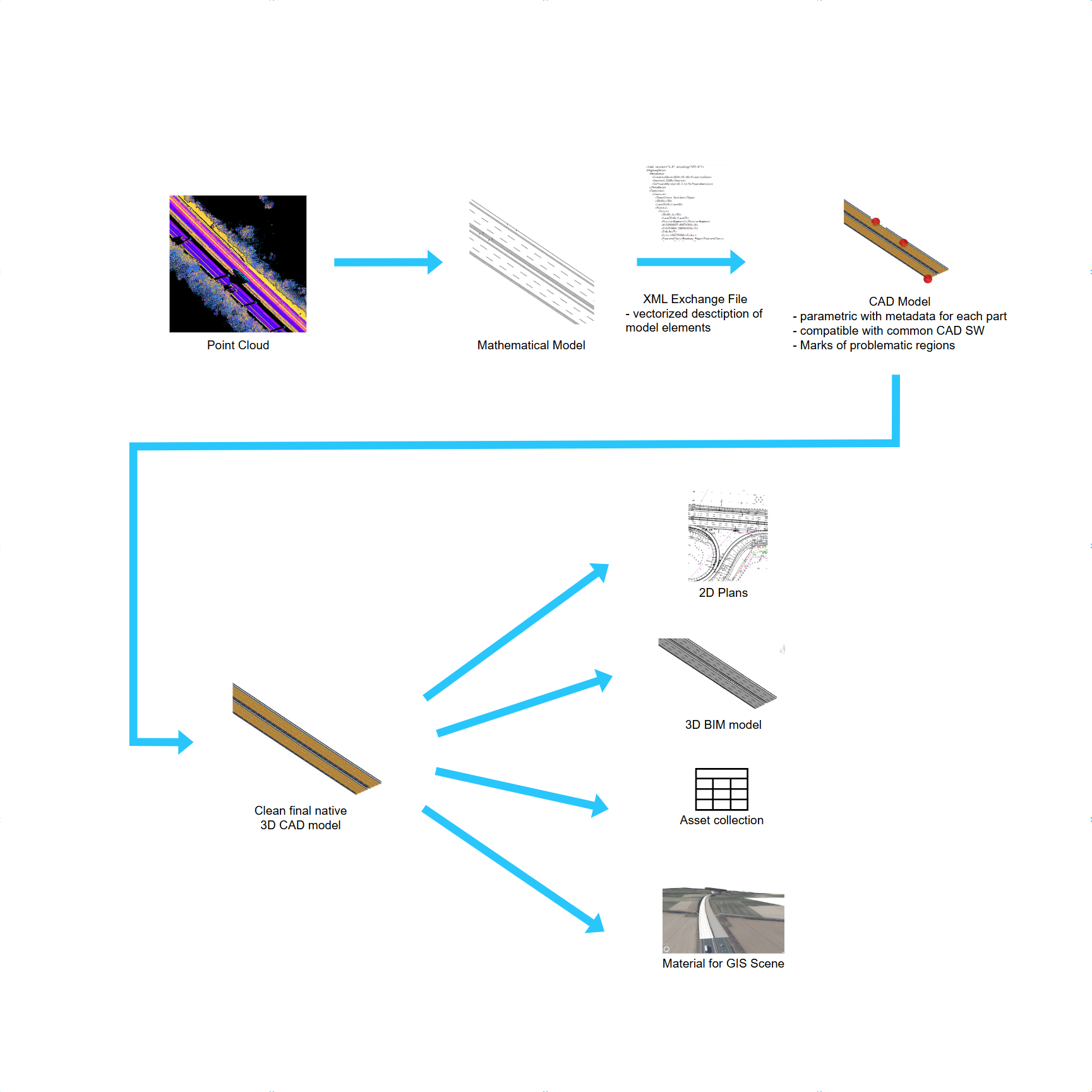
Surová data mračen bodů jsou převedena do matematického modelu (Modul 1). Tento model je předán Modulu 2 jako XML soubor obsahující vektorový popis prvků modelu. Modul 2 generuje geometrické prvky s metadaty ve formátu CAD. Výsledek je dostupný v několika formách - CAD/BIM model, GIS model, 2D plány a označení problematických oblastí jako zdroj pro feedback smyčku.
Zásluhy
Vermessungsbüro Rink GbR
Lang&Lang GmbH
ioLabs AG
|
Technologie
ioFramework
Python
ArcGIS Online
ArcGIS Pro
Open3D
Pytorch
Scipy
Rhinoceros
Autodesk Revit
GEOgraf
Lidar 3D skenování
3D skenování dronem
|