Point cloudy jsou přesné, ale obtížně použitelné. Meshe jsou výkonné, ale náročné na zdroje.
Tento článek porovnává Point clouds, Meshes a Gaussian splats a vysvětluje, kdy splats umožňují rychlejší, plynulejší a fotorealistické náhledy. Gaussian Splatting se rychle ukazuje jako praktický průlom v oblasti vykreslování reality-capture dat v reálném čase. V ioFM aktivně zkoumáme, jak může tato technologie zlepšit způsob, jakým uživatelé zobrazují a prohlížejí objekty – zejména v browseru. Častou výzvou ve správě budov a digitálních dvojčat je, že mnoho uživatelů chce prohlížet prostory co nejblíže realitě, nikoli prostřednictvím abstraktního technického modelu. Tradiční 3D pipelines, zejména ty, které převádějí laserové skeny na polygonové sítě, mohou být výpočetně náročné, pomalé na zpracování a obtížné na streamování a plynulé zobrazování na webu.
Nyní pozorujeme posun od geometrie založené na vrcholech a plochách (meshe) k odlišné reprezentaci, která upřednostňuje vizuální věrnost a výkon. Namísto rekonstrukce přesných povrchů se Gaussian Splatting zaměřuje na reprodukci toho, jak scéna vypadá z různých úhlů pohledu – zachycuje prostor způsobem, který lze efektivně vykreslovat v reálném čase. Vzhledem k tomu, že vykreslený náhled v ioFM slouží primárně k vizuálnímu průzkumu a orientaci (nikoli k přesnému geometrickému měření), může být použití zobrazení optimalizovaného pro jasné zobrazenní a rychlou interakci smysluplné. Tento článek popisuje rozdíly mezi různými přístupy k 3D vykreslování – od point cloudů přes meshe až po Gaussian splaty – aby ukázal, který přístup přináší lepší výsledky pro interaktivní prohlížení.
Point Cloud — syrový záznam reality
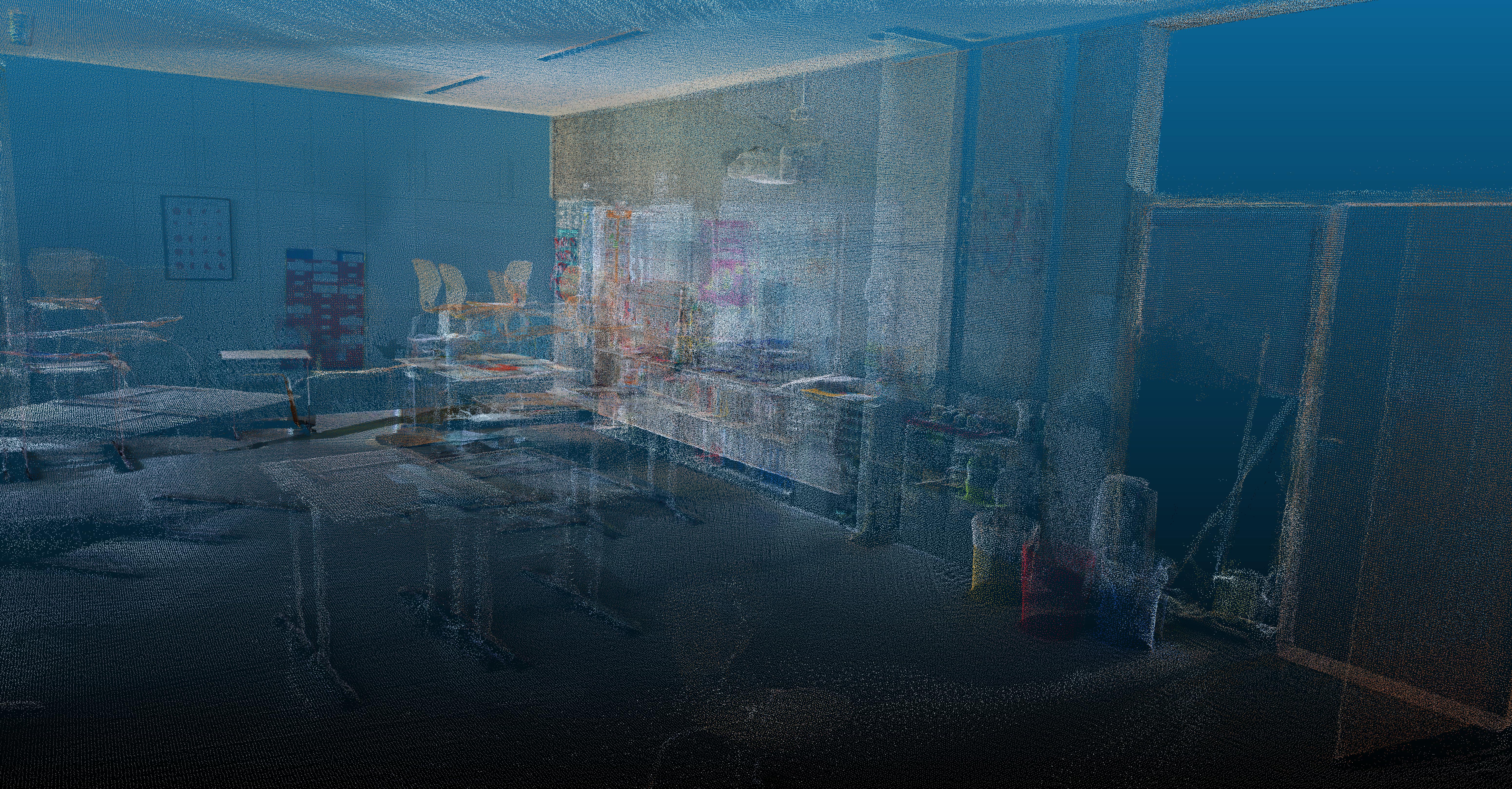
Point cloud je nejpřímějším výstupem zachycení reality: hustá množina naměřených 3D bodů, často obohacená o atributy jako barva nebo intenzita. Specializované nástroje dokáží mračna bodů vizualizovat a mohou být vysoce přesné – závisí to především na skenovacím hardwaru a podmínkách snímání. Zároveň jsou point cloudy vizuálně obtížně interpretovatelné. Protože jednotlivé body nemají žádný „povrch", mohou detailní pohledy působit řídce: při přibližování se body jeví menší a mezery mezi nimi jsou viditelnější. Prohlížeče to řeší různými vykreslovacími triky, ale výsledek je stále méně intuitivní než reprezentace založená na povrchu. Mračna bodů bývají také velká a nejsou ideální pro plynulé webové náhledy.
Obrázek 1: point cloud s původní velikostí bodů – body vytvářejí „mlhovité" prostředí bez jasného pocitu pevného objemu.
Obrázek 2: Point cloud se zvětšenými body (3×) – funguje lépe z větší vzdálenosti, ale v blízkosti kamery stále působí vizuálně prázdně.
Od point cloudu k použitelnému 3D zobrazení
Meshe lze vytvořit buď jako interpretaci point cloudu nebo z fotogrammetrie. Oba procesy vedou k objemovému tělesu, které je vhodné pro CAD/BIM, výběr, měření a inženýrské aplikace – jejich generování však může být pomalé a čím jsou detailnější, tím náročnější je jejich streamování v prohlížeči. Gaussian splaty naproti tomu vezmou sekvenci fotografií nebo jednoduché video a vytvoří fotorealistický, vysoce responzivní 3D náhled – ideální pro navigaci a vizuální kontext, ale ne pro přesná měření nebo fyzikální simulace.
Co jsou 3D meshe?
3D mesh je standardní reprezentace používaná v CAD a BIM workflow. Skládá se z vrcholů (bodů) spojených hranami, které tvoří plochy, typicky trojúhelníky, jež společně vytvářejí souvislý povrch (geometrickou plochu). Pro dosažení realistického vzhledu lze na povrch mapovat textury. Tato reprezentace je výborná pro definování fyzických hranic a podporuje úlohy založené na geometrii, jako je výběr, měření a simulace.
Klíčovou vlastností meshů je rozlišení: vyšší rozlišení znamená menší plochy, a tedy více geometrických detailů. Generování kvalitního meshe ze skenovaných dat (například point cloudu) je však výpočetně náročné. Typicky zahrnuje rekonstrukci povrchu („meshování" prostoru mezi body), čištění/remeshing a baking textur. U složitých scén může tento proces stále ztrácet jemné detaily (tenké trubky, kabely, malé prvky) a vyžaduje pečlivé vyvážení mezi geometrickou věrností a zvládnutelnou velikostí souborů – zejména pokud má být výsledek streamován a zobrazen v prohlížeči.
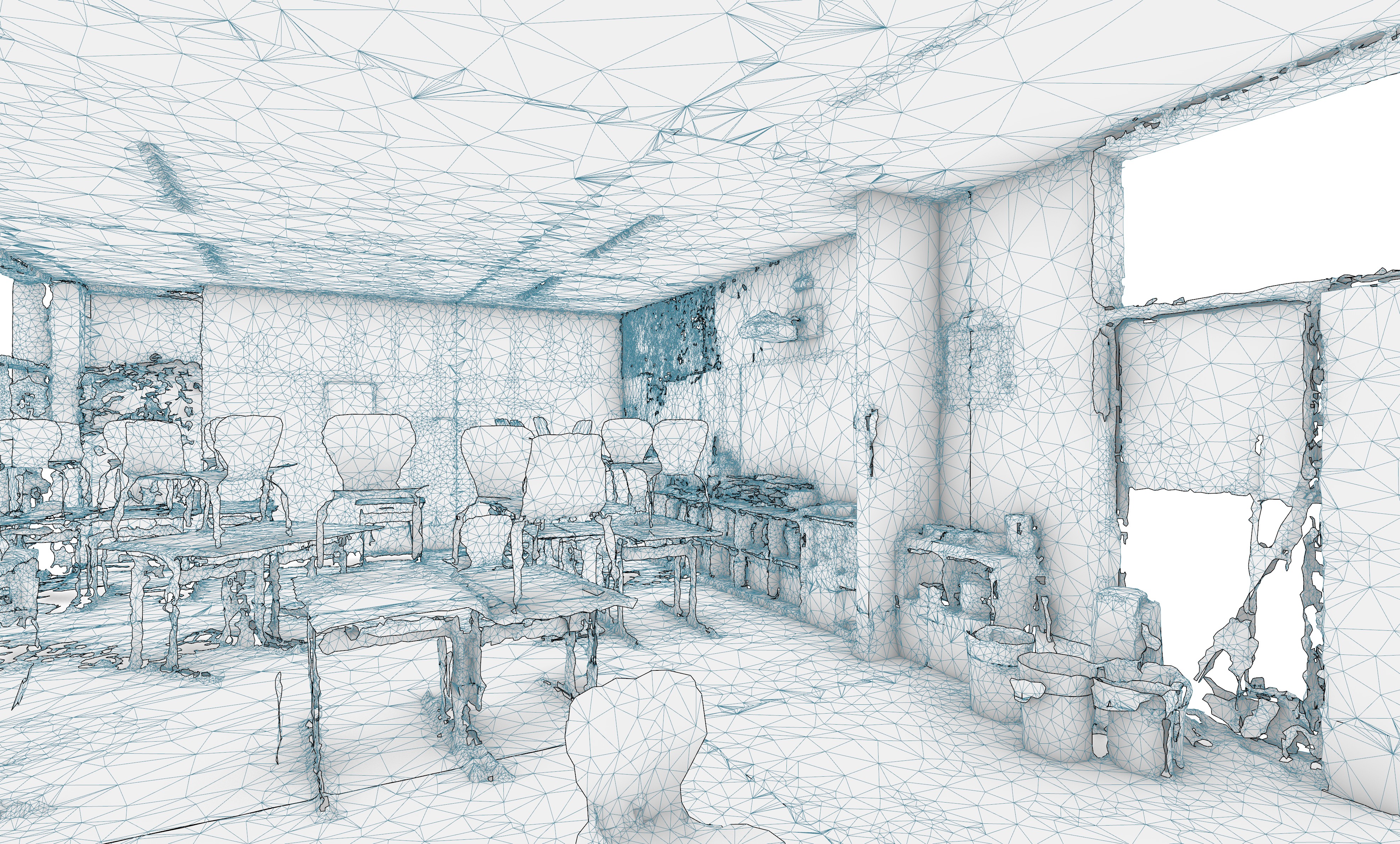
Obrázek 3: Trojúhelníky meshe viditelné v rendereru – geometrie nízké kvality se jeví vyhlazeně a může postrádat tenké detaily; zachycení reflexních a transparentních objektů je problematické.
Obrázek 4: Příklad triangulovaného meshe.
Co je Gaussian Splatting?
Gaussian Splatting je moderní přístup k 3D vizualizaci, který upřednostňuje vizuální realismus a interaktivní rychlost před explicitní povrchovou geometrií.
Namísto rekonstrukce „pevné" geometrické plochy jako mesh reprezentuje scénu jako miliony malých, poloprůhledných 3D elipsoidů („splatů"). Každý splat uchovává informace o vzhledu, jako je barva a průhlednost, a společně reprodukují, jak scéna vypadá z různých úhlů pohledu. Při vykreslování se splaty prolínají do fotorealistického výsledku, který může působit téměř jako video, a přitom umožňuje volnou navigaci ve 3D. To činí Gaussian Splatting obzvláště atraktivním pro workflow náhledů a vizuálních inspekcí, zachycuje detaily, které jsou pro meshe často obtížné – tenké struktury (kabely, zábradlí), jemné textury a komplexní vizuální efekty.
Kvalitní splaty se typicky generují z fotosequence nebo jednoduchého video průchodu, protože obrázky obsahují vizuální vodítka potřebná k reprodukci odrazů, průhlednosti a jemného vzhledu. Zatímco skenovaná data (např. point cloud) mohou pomoci se zarovnáním a stabilitou, použití obrazového materiálu je obvykle nezbytné pro dosažení nejlepší vizuální věrnosti.
Myšlenka předběhla svou dobu (historie Gaussian Splattingu)
Základní myšlenka „splattingu" sahá až k grafickým technikám z 90. let, které vykreslovaly scény promítáním malých 3D blobů na 2D obrazovku místo kreslení trojúhelníků. Postupem času (2000 až 2020) se reality-capture workflow posunuly směrem k fotogrammetrii a meshování, podporované uživatelsky přívětivými nástroji, které zpřístupnily rekonstrukci z překrývajících se fotografií širokému publiku.
V nedávné době Neural Radiance Fields (NeRFs) demonstrovaly působivý fotorealismus založený na systémech hlubokých neuronových sítí, ale jejich náklady na trénink a vykreslování omezily praktické použití v reálném čase. V srpnu 2023 výzkumníci představili 3D Gaussian Splatting (3DGS) jako způsob, jak dosáhnout vizuální kvality podobné NeRF s výkonem v reálném čase. Klíčovou změnou byla explicitní reprezentace scény jako optimalizovaných Gaussovských primitiv (splatů), což umožňuje rychlé vykreslování na moderních GPU.
Technologie za splaty
Technicky je Gaussian Splat definován specifickou sadou matematických parametrů: Pozice (XYZ), Kovariance (která definuje rotaci a škálování pro vytvoření protáhlého 3D elipsoidu), Průhlednost a Barva. Zásadní je, že barva se počítá pomocí Spherical Harmonics, což umožňuje splatu měnit vzhled v závislosti na úhlu pohledu – simuluje tak reálné odrazy světla. Na rozdíl od meshů, které spoléhají na pevnou geometrii, splaty používají Gaussovo rozdělení (zvonovou křivku), což znamená, že jsou husté ve středu a měkce vyhasínají na okrajích. Tato měkkost umožňuje milionům z nich se překrývat a plynule prolínat. Vykreslovací engine používá rychlý třídicí algoritmus (rasterizaci) k promítnutí těchto částic na obrazovku zezadu dopředu, což umožňuje fotorealistické vizualizace při vysokých snímkových frekvencích (60+ FPS) bez vysoké výpočetní zátěže ray tracingu.
Ve srovnání s těžšími geometrickými pipeline jsou Gaussian splaty dobře vhodné pro interaktivní prohlížení, protože se efektivně vykreslují na GPU a lze je plynule streamovat a zobrazovat v moderních prohlížečích. Technicky zůstávají splaty explicitním seznamem primitiv: pozice, škálování, rotace, barva a průhlednost, což dobře odpovídá technikám vykreslování a komprese v reálném čase. V praxi to umožňuje rychlé workflow „od zachycení k zobrazení" (zejména z foto nebo video vstupů), poskytuje vysokou vizuální věrnost při interaktivních snímkových frekvencích i ve webových prohlížečích a dobře škáluje, protože data splatů lze optimalizovat a komprimovat – za předpokladu použití rozumných nastavení pro udržení zvládnutelné velikosti souborů.
Nejen interiéry: Gaussian Splatting ve velkém měřítku
Obrázek 7: Příklad náhledu ve stylu splatů vytvořeného z dat point cloudu. Protože není natrénován z fotek/videa, odrazy a průhlednost nejsou plně zachyceny.
Obrázek 8: 3D mesh vytvořený pomocí fotogrammetrického softwaru.
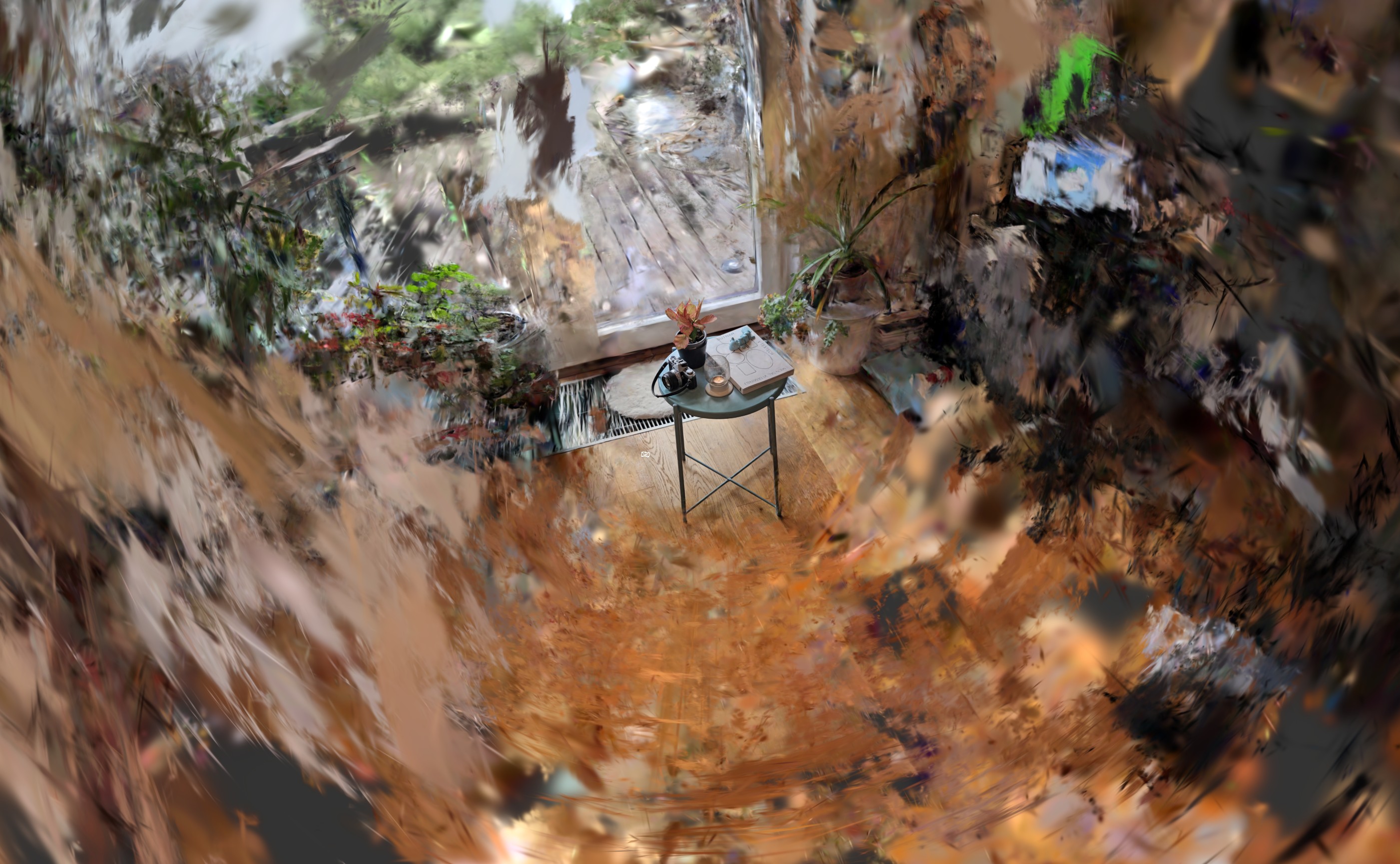
Obrázek 9: Stejná scéna jako na obrázku 6, vykreslená pomocí Gaussian Splattingu.
Obrázek 10: Gaussian splaty jsou závislé na pozici kamery, takže okraje skenu mohou při pohledu z dálky působit chaoticky.
Kdy vyhrávají meshe / kdy vyhrávají Gaussian splaty
Volba mezi meshi a Gaussian splaty závisí na tom, co od dat potřebujete: inženýrsky přesnou geometrii nebo rychlý, realistický vizuální kontext.
Meshe vyhrávají, když je geometrie produktem. Pokud potřebujete editovat model v tradičním CAD workflow, spouštět inženýrské simulace nebo provádět spolehlivé geometrické analýzy (např. měření objemu), mesh zůstává správným nástrojem. Meshe poskytují explicitní povrchy a topologii, což je přesně to, co očekávají navazující inženýrské nástroje.
Gaussian splaty vyhrávají, když je cílem prohlížení a pochopení reality. Pro rychlý náhled, navigaci a vizuální inspekci jsou splaty těžko překonatelné: vykreslují se efektivně, dobře se streamují a zachovávají „look and feel" scény s vysokou věrností. To je činí ideálními pro environmentální kontext – vidět stav prostor, instalací a okolí – zejména ve webovém workflow, kde záleží na odezvě.
Záleží také na vstupních datech. Gaussian Splatting typicky vyžaduje fotosequenci nebo video průchod (snadno zachytitelné kamerou telefonu). Výstupem je primárně grafický náhled, nikoli reprezentace, kterou můžete přímo použít pro tvorbu BIM modelu nebo přesná měření (mohou existovat výjimky, ale ty je třeba validovat pro každý případ použití). 360° LiDAR skenování produkuje husté, přesné point cloudy, které jsou mnohem vhodnější jako základ pro modelování a přesnou geometrii. Pokud LiDAR záznam není doplněn dostatečným množstvím fotek/videa, splaty lze stále vygenerovat, ale často s mezerami u náročných efektů jako odrazy, průhlednost a jemné vizuální detaily.
Srovnání funkcí
Výhody
Nevýhody
Point Cloud
Surová naměřená data
Přesnost odpovídající reálnému světu (přesnost závisí především na použitém hardwaru a podmínkách snímání)
Bez chyb zpracování díky absenci zpracování
Obtížně vizuálně interpretovatelný
Obrovská velikost souborů (v podstatě velký seznam bodů + atributů)
Obtížné efektivní zpracování (žádné explicitní spojení mezi body)
3D Mesh
Kompatibilní s většinou CAD/BIM nástrojů
Přesné výpočty objemu a fyzikální kolize
„Pevné" povrchy umožňují přesný picking/výběr
Průmyslový standard pro inženýrské změny a redesigny
Pomalé generování z 3D skenů (point cloudů)
Často ztrácí vizuální detaily (textury, drobné značky, rez, nečistoty)
Ostré výsledky vyžadují vysoký počet polygonů, což je pro webové prohlížeče náročné
Riziko „blob" nebo přehlazené geometrie ve složitých oblastech
Gaussian Splat
Fotorealistická vizuální věrnost
Extrémně rychlé generování
Snadné generování z fotografií nebo video záznamu
Dobře zvládá tenké struktury (kabely, zábradlí, ploty)
Téměř okamžitý workflow „od skenu k zobrazení"
Novější technologie (menší softwarová podpora)
Není „pevná" geometrie (omezené pro měření jako objem)
Nevhodné pro fyzikální simulace
Může vést k velkým souborům, pokud není optimalizováno
Obrázek 11.1: Původní velikost bodů.Obrázek 11.2: Zvětšené body (3×).
Obrázek 12.1: Vykreslený mesh model vytvořený z point cloudu.Obrázek 12.2: Vykreslený + viditelné trojúhelníky meshe.
Obrázek 13: Na půli cesty ke Gaussian Splattingu. Bez optimalizovaných parametrů průhlednosti a tvaru musí vizualizace spoléhat pouze na barevná data bodů.
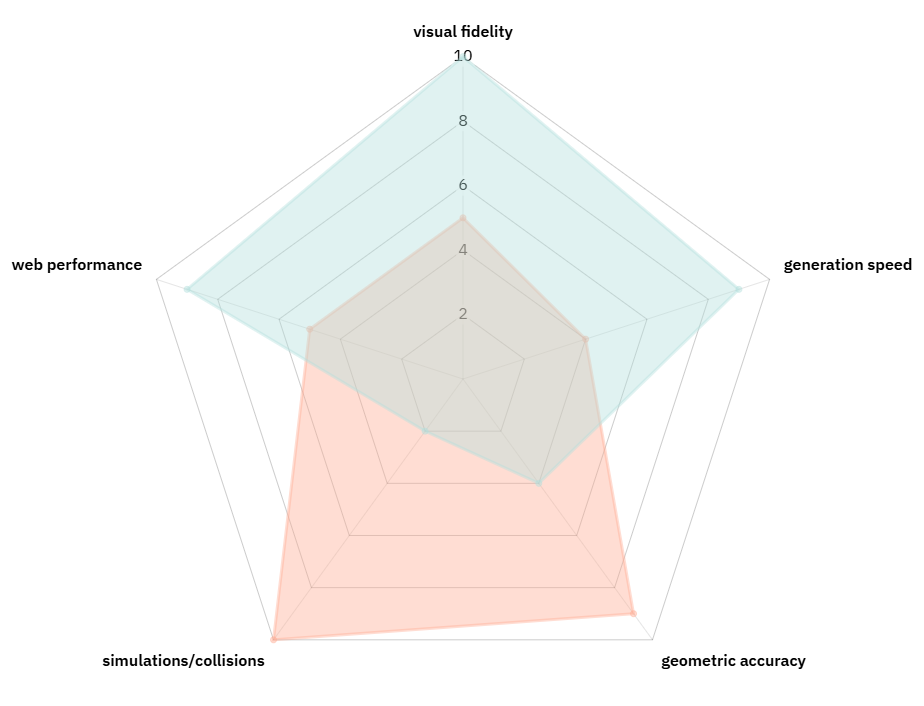
Obrázek 14: Grafické srovnání výhod a nevýhod 3D meshů (červeně) a Gaussian splatů (modře). Copyright ioLabs.
Vaše výhody – Gaussian Splat v ioFM
Gaussian Splatting může výrazně snížit bariéru pro vytvoření užitečného 3D náhledu. Místo potřeby specializovaných LiDAR skenerů a náročného post-processingu často stačí jednoduché video průchodu ze smartphonu (nebo dronu pro větší lokality) k vygenerování kvalitního splat náhledu. To činí reality capture přístupnějším pro facility týmy a snadněji opakovatelným v čase.
Pro ioFM zážitek je klíčovým přínosem rychlost a vizuální kontext. Rychlejší zpracování umožňuje kratší cykly od uploadu k náhledu a plynulejší webové zobrazení. Zároveň splaty poskytují realističtější dojem o aktuálním stavu prostor – detaily, které mesh modely často postrádají. Protože pořízení a zpracování jsou levnější, pravidelné aktualizace se stávají proveditelné, což pomáhá udržovat náhled v souladu s realitou.
Nejsilnějším směrem pro ioFM je hybridní přístup. Náš současný mesh slouží jako vizuální vrstva nad Minimal BIM, kde přesná geometrie podporuje strukturu místností, správu assetů a výpočty. Gaussian splaty přidávají vysoce věrnou vizuální vrstvu pro navigaci a orientaci – přinášejí to nejlepší z obou světů: realistickou vizualizaci s nízkou datovou složitostí plus strukturovanou geometrii pro FM workflow.
Závěr
Reality capture se posouvá směrem k jednodušším, rychlejším a efektivnějším reprezentacím. Místo protlačování každého skenu těžkými meshovacími pipeline můžeme volit formáty, které odpovídají skutečnému účelu 3D zobrazení. Pro každodenní facility práci často není cílem dokonalá inženýrská geometrie, ale kvalitní, důvěryhodný vizuální náhled, který se rychle načte a zůstane plynulý v prohlížeči.
Proto je Gaussian Splatting tak slibným směrem: přináší fotorealistický kontext s vynikajícím výkonem a umožňuje skutečný workflow „od zachycení k zobrazení" bez ztráty odezvy UI. Zkrátka jde o použití správného nástroje pro daný úkol – a pro náhledy prostor a pochopení reálných podmínek mohou Gaussian splaty nabídnout jasně lepší zážitek.