Point clouds are accurate but hard to use. Meshes are powerful but heavy. This article compares point clouds, meshes, and Gaussian splats, and explains when splats enable faster, smoother, photoreal previews.
Gaussian Splatting entwickelt sich rasant zu einem praktischen Durchbruch im Bereich der Echtzeit-Darstellung von Reality-Capture-Daten. Bei ioFM evaluieren wir aktiv, wie diese Technologie die Art und Weise verbessern kann, wie Nutzer Gebäude erkunden und verstehen – insbesondere im Browser. Eine wiederkehrende Herausforderung im Facility Management und bei digitalen Zwillingen besteht darin, dass viele Nutzer Räume so realitätsnah wie möglich navigieren möchten, nicht durch ein abstraktes technisches Modell. Traditionelle 3D-Pipelines, insbesondere jene, die Laserscans in Polygonnetze umwandeln, können rechenintensiv, langsam in der Verarbeitung und schwierig im Web zu streamen und flüssig anzuzeigen sein.
Wir beobachten nun einen Wandel weg von vertex- und flächenbasierter Geometrie (Meshes) hin zu einer anderen Darstellungsform, die visuelle Wiedergabetreue und Performance priorisiert. Anstatt exakte Oberflächen zu rekonstruieren, konzentriert sich Gaussian Splatting darauf, das Erscheinungsbild einer Szene von Blickpunkt zu Blickpunkt zu reproduzieren – das Aussehen wird so erfasst, dass es in Echtzeit effizient gerendert werden kann. Da die gerenderte Vorschau in ioFM primär für die visuelle Erkundung und Orientierung genutzt wird (und nicht für präzise geometrische Messungen), kann die Einführung einer Darstellung, die für Wahrnehmung und interaktive Geschwindigkeit optimiert ist, sehr sinnvoll sein. Dieser Artikel beschreibt die Unterschiede zwischen verschiedenen 3D-Rendering-Ansätzen – von Punktwolken als roher Realitätserfassung über Meshes bis hin zu Gaussian Splats – um zu zeigen, welcher Ansatz bessere Ergebnisse für interaktive Betrachtung liefert.
Punktwolke – die rohe Erfassung der Realität
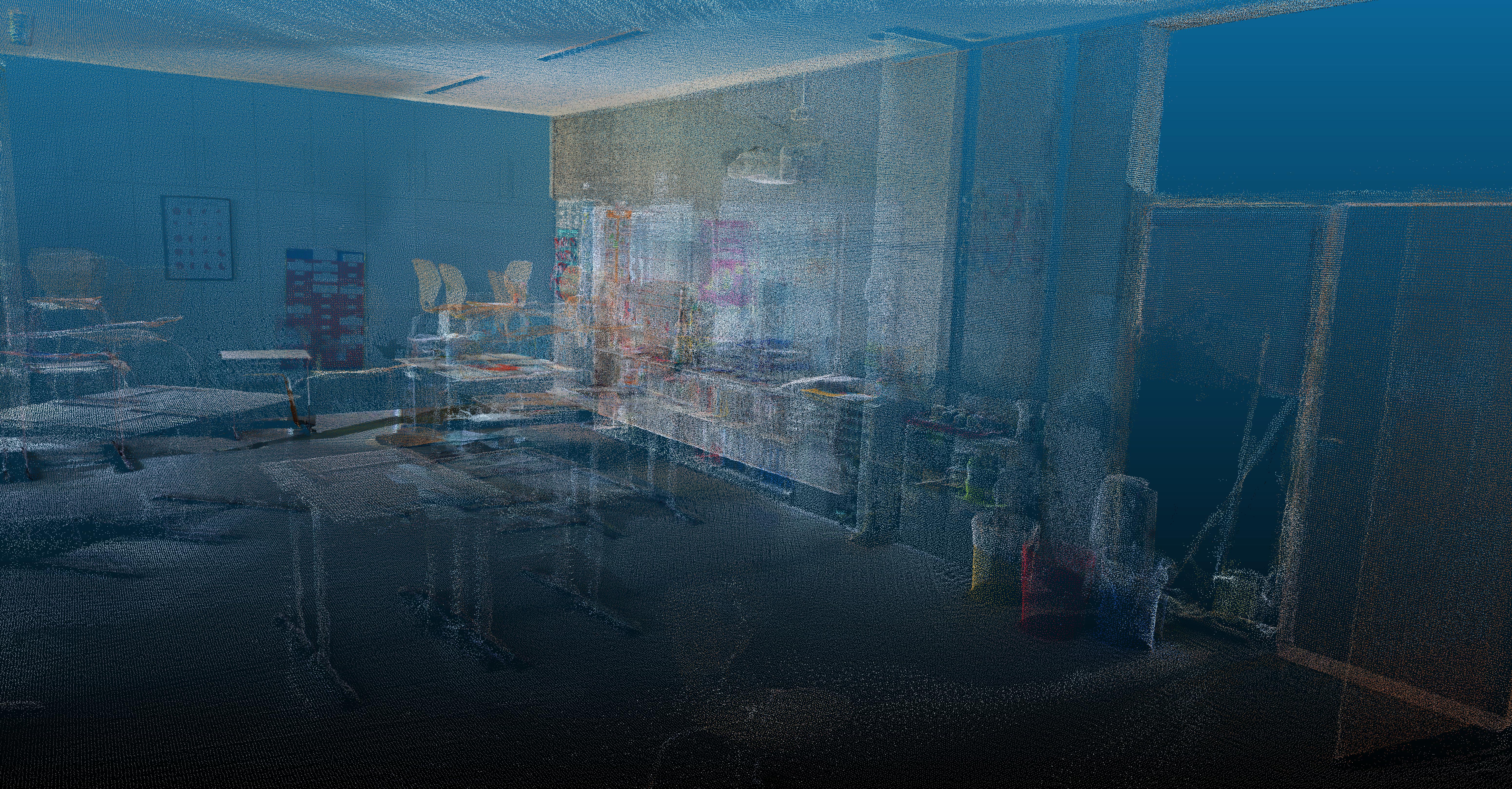
Eine Punktwolke ist das direkteste Ergebnis der Realitätserfassung: eine dichte Menge gemessener 3D-Punkte, oft angereichert mit Attributen wie Farbe oder Intensität. Spezialisierte Werkzeuge können Punktwolken visualisieren, und sie können sehr genau sein – abhängig hauptsächlich von der Scan-Hardware und den Aufnahmebedingungen. Gleichzeitig sind Punktwolken visuell schwer zu interpretieren. Da einzelne Punkte keine „Oberfläche" haben, können Nahansichten spärlich wirken: beim Heranzoomen erscheinen die Punkte kleiner und die Lücken zwischen ihnen werden sichtbarer. Verschiedene Viewer begegnen diesem Problem mit unterschiedlichen Rendering-Tricks, aber das Ergebnis ist dennoch weniger intuitiv als eine oberflächenbasierte Darstellung. Punktwolken sind ausserdem tendenziell gross und nicht ideal für flüssige, browserbasierte Vorschauen.
Abbildung 1: Punktwolke mit ursprünglicher Punktgrösse – die Punkte erzeugen eine „nebelige" Umgebung ohne klares Gefühl für solides Volumen.
Abbildung 2: Punktwolke mit vergrösserten Punkten (3×) – funktioniert besser aus der Distanz, wirkt aber in Kameranähe immer noch visuell leer.
Von der Punktwolke zur nutzbaren 3D-Ansicht
Meshes können entweder als Interpretation einer Punktwolke oder aus Photogrammetrie erstellt werden. Beide Prozesse resultieren in einem Volumenkörper, der für CAD/BIM, Selektion, Messungen und Engineering-Anwendungsfälle geeignet ist – allerdings kann die Generierung langsam sein, und je detaillierter sie sind, desto aufwendiger ist das Streaming im Browser. Gaussian Splats hingegen nehmen eine Fotosequenz oder einen einfachen Video-Rundgang und erzeugen eine fotorealistische, hochreaktive 3D-Vorschau – ideal für Navigation und visuellen Kontext, aber nicht für präzise Messungen oder Physiksimulationen gedacht.
Was sind 3D-Meshes?
Ein 3D-Mesh ist die Standarddarstellung in CAD- und BIM-Workflows. Es besteht aus Vertices (Punkten), die durch Kanten verbunden sind und Flächen bilden – typischerweise Dreiecke –, die zusammen eine durchgehende Oberfläche (eine geometrische Hülle) erzeugen. Um ein realistisches Aussehen zu erzielen, können Texturen auf die Oberfläche gemappt werden. Diese Darstellung eignet sich hervorragend zur Definition physischer Grenzen und unterstützt geometriebasierte Aufgaben wie Selektion, Messungen und Simulationen.
Eine wichtige Eigenschaft von Meshes ist die Auflösung: Höhere Auflösung bedeutet kleinere Flächen und damit mehr geometrisches Detail. Die Generierung eines hochwertigen Meshes aus Scandaten (wie einer Punktwolke) ist jedoch rechenintensiv. Sie umfasst typischerweise Oberflächenrekonstruktion („Meshing" des Raums zwischen den Punkten), Bereinigung/Remeshing und Texture Baking. Bei komplexen Szenen können dabei feine Details verloren gehen (dünne Rohre, Kabel, kleine Elemente), und es erfordert eine sorgfältige Abwägung zwischen geometrischer Wiedergabetreue und handhabbaren Dateigrössen – insbesondere wenn das Ergebnis im Browser gestreamt und angezeigt werden soll.
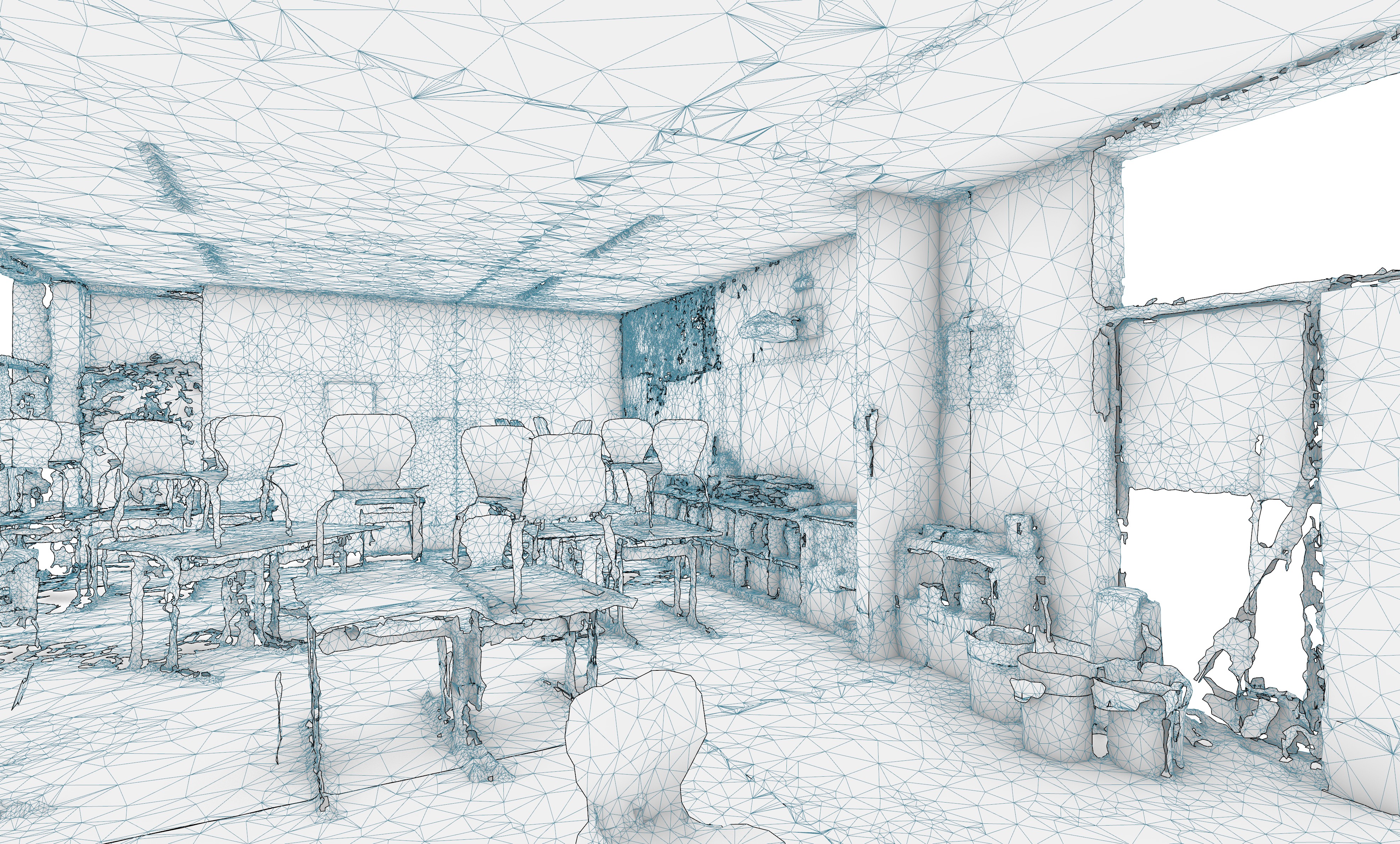
Abbildung 3: Mesh-Dreiecke sichtbar im Renderer – Geometrie niedriger Qualität erscheint geglättet und kann dünne Details verfehlen; reflektierende und transparente Objekte bleiben herausfordernd.
Abbildung 4: Beispiel eines triangulierten Meshes.
Was ist Gaussian Splatting?
Gaussian Splatting ist ein moderner Ansatz zur 3D-Visualisierung, der visuellen Realismus und interaktive Geschwindigkeit gegenüber expliziter Oberflächengeometrie priorisiert.
Anstatt eine „solide" geometrische Hülle wie ein Mesh zu rekonstruieren, stellt es eine Szene als Millionen kleiner, halbtransparenter 3D-Ellipsoide („Splats") dar. Jeder Splat speichert Erscheinungsinformationen wie Farbe und Deckkraft, und zusammen reproduzieren sie, wie die Szene aus verschiedenen Blickwinkeln aussieht. Beim Rendern verschmelzen die Splats zu einem fotorealistischen Ergebnis, das sich fast wie Video anfühlen kann, während gleichzeitig freie Navigation im 3D-Raum möglich bleibt. Dies macht Gaussian Splatting besonders attraktiv für Vorschau- und visuelle Inspektions-Workflows und erfasst Details, die für Meshes oft schwierig sind – wie dünne Strukturen (Kabel, Geländer), feine Texturen und komplexe visuelle Effekte.
Hochwertige Splats werden typischerweise aus einer Fotosequenz oder einem einfachen Video-Rundgang generiert, da Bilder die visuellen Hinweise enthalten, die zur Reproduktion von Reflexionen, Transparenz und feinem Erscheinungsbild benötigt werden. Während Scandaten (z.B. eine Punktwolke) bei der Ausrichtung und Stabilität helfen können, ist die Verwendung von Bildmaterial in der Regel unerlässlich, um die beste visuelle Wiedergabetreue zu erzielen.
Die Idee ihrer Zeit voraus (eine Geschichte des Gaussian Splatting)
Die zugrunde liegende Idee des „Splatting" geht auf Grafiktechniken der 1990er Jahre zurück, die Szenen renderten, indem sie kleine 3D-Blobs auf den 2D-Bildschirm projizierten, anstatt Dreiecke zu zeichnen. Im Laufe der Zeit (2000er bis 2020er) verlagerten sich Reality-Capture-Workflows in Richtung Photogrammetrie und Meshing, unterstützt durch benutzerfreundliche Werkzeuge, die die Rekonstruktion aus überlappenden Fotos breit zugänglich machten.
In jüngerer Zeit demonstrierten Neural Radiance Fields (NeRFs) beeindruckenden Fotorealismus basierend auf tiefen neuronalen Netzwerksystemen, aber ihre Trainings- und Rendering-Kosten schränkten den praktischen Echtzeiteinsatz ein. Im August 2023 stellten Forscher 3D Gaussian Splatting (3DGS) als Möglichkeit vor, NeRF-ähnliche visuelle Qualität mit Echtzeit-Performance zu erreichen. Die entscheidende Änderung war die explizite Darstellung der Szene als optimierte Gaussian-Primitive (Splats), was schnelles Rendering auf modernen GPUs ermöglicht.
Die Technologie hinter den Splats
Technisch wird ein Gaussian Splat durch einen spezifischen Satz mathematischer Parameter definiert: Position (XYZ), Kovarianz (die Rotation und Skalierung definiert, um ein gestrecktes 3D-Ellipsoid zu erzeugen), Deckkraft (Transparenz) und Farbe. Entscheidend ist, dass die Farbe mithilfe von Spherical Harmonics berechnet wird, was es dem Splat ermöglicht, sein Erscheinungsbild je nach Betrachtungswinkel zu ändern – und so reale Lichtreflexionen zu simulieren. Im Gegensatz zu Meshes, die auf harter Geometrie basieren, verwenden Splats eine Gauss-Verteilung (eine Glockenkurve), was bedeutet, dass sie im Zentrum dicht sind und an den Rändern sanft auslaufen. Diese Weichheit ermöglicht es Millionen von ihnen, sich zu überlappen und nahtlos zu verschmelzen. Die Rendering-Engine verwendet einen schnellen Sortieralgorithmus (Rasterisierung), um diese Partikel von hinten nach vorne auf den Bildschirm zu projizieren, was fotorealistische Visualisierungen bei hohen Bildraten (60+ FPS) ohne die hohe Rechenlast von Raytracing ermöglicht.
Im Vergleich zu schwereren Geometrie-Pipelines eignen sich Gaussian Splats gut für interaktive Betrachtung, da sie effizient auf GPUs rendern und in modernen Browsern flüssig gestreamt und angezeigt werden können. Technisch bleiben Splats eine explizite Liste von Primitiven: Position, Skalierung, Rotation, Farbe und Deckkraft, was gut zu Echtzeit-Rendering- und Komprimierungstechniken passt. In der Praxis ermöglicht dies schnelle „Capture-to-View"-Workflows (insbesondere bei Foto- oder Video-Eingaben), liefert hohe visuelle Wiedergabetreue bei interaktiven Bildraten auch in Web-Viewern und skaliert gut, da die Splat-Daten optimiert und komprimiert werden können – vorausgesetzt, es werden sinnvolle Einstellungen verwendet, um die Dateigrössen handhabbar zu halten.
Über Innenräume hinaus: Gaussian Splatting im grossen Massstab
Die Gaussian-Splatting-Methode eignet sich nicht nur für die Darstellung von Innenräumen – mit Splats lassen sich beispielsweise ganze Gebäudecampusse oder Industrieareale erfassen. Einen solchen Projektfall beschreibt der Artikel „How to Create the Best Gaussian Splats in ArcGIS Reality" von Franziska Nied, veröffentlicht am 06.11.2025. Den vollständigen Artikel können Sie hier lesen: https://www.esri.com/arcgis-blog/products/arcgis-pro/3d-gis/how-to-create-the-best-gaussian-splats-in-arcgis-reality
Abbildung 6: Beispiel einer Splat-artigen Vorschau, erstellt aus Punktwolkendaten. Da sie nicht aus Fotos/Video trainiert wurde, werden Reflexionen und Transparenz nicht vollständig erfasst.
Abbildung 7: 3D-Mesh, erstellt mit Photogrammetrie-Software.
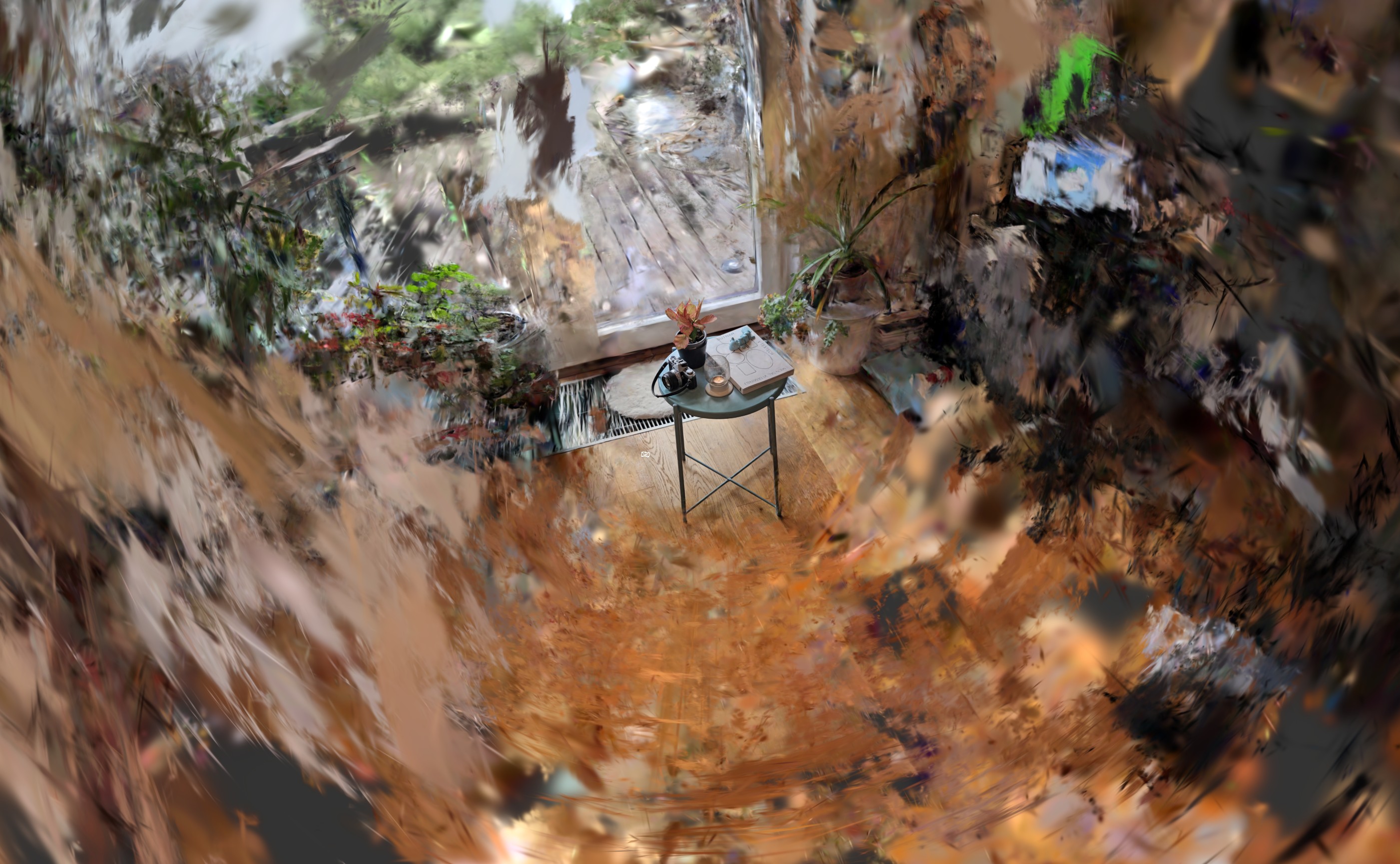
Abbildung 8: Dieselbe Szene wie in Abbildung 6, gerendert mit Gaussian Splatting.
Abbildung 9: Die Gaussian Splats sind kamerapositionsabhängig, sodass die Ränder des Scans aus der Ferne chaotisch erscheinen können.
Wann Meshes gewinnen / wann Gaussian Splats gewinnen
Die Wahl zwischen Meshes und Gaussian Splats hängt davon ab, was Sie von den Daten benötigen: Engineering-taugliche Geometrie oder schnellen, realistischen visuellen Kontext.
Meshes gewinnen, wenn Geometrie das Produkt ist. Wenn Sie das Modell in einem traditionellen CAD-Workflow bearbeiten, Engineering-Simulationen durchführen oder zuverlässige geometrische Analysen (z.B. Volumenmessungen) ausführen müssen, bleibt ein Mesh das richtige Werkzeug. Meshes bieten explizite Oberflächen und Topologie, was genau das ist, was nachgelagerte Engineering-Tools erwarten.
Gaussian Splats gewinnen, wenn das Ziel die Betrachtung und das Verständnis der Realität ist. Für schnelle Vorschau, Navigation und visuelle Inspektion sind Splats kaum zu übertreffen: Sie rendern effizient, streamen gut und bewahren das „Look and Feel" einer Szene mit hoher Wiedergabetreue. Dies macht sie ideal für Umgebungskontext – den Zustand von Räumen, Installationen und Umgebungen sehen – insbesondere in einem webbasierten Workflow, bei dem Reaktionsfähigkeit wichtig ist.
Auch die Eingabedaten spielen eine Rolle. Gaussian Splatting erfordert typischerweise eine Fotosequenz oder einen Video-Rundgang (einfach mit einer Smartphone-Kamera aufzunehmen). Die Ausgabe ist primär eine grafische Vorschau, keine Darstellung, die Sie direkt für die BIM-Modellerstellung oder präzise Messungen verwenden können (es mag Ausnahmen geben, aber diese müssen pro Anwendungsfall validiert werden). 360°-LiDAR-Scanning produziert dichte, präzise Punktwolken, die viel besser als Grundlage für Modellierung und genaue Geometrie geeignet sind. Wenn die LiDAR-Aufnahme nicht mit ausreichend Fotos/Video gepaart ist, können Splats trotzdem generiert werden, aber oft mit Lücken bei anspruchsvollen Effekten wie Reflexionen, Transparenz und feinen visuellen Details.
Funktionsvergleich
Vorteile
Nachteile
Punktwolke
Rohe Messdaten
Genau zur realen Welt (Präzision hängt hauptsächlich von der verwendeten Hardware und den Aufnahmebedingungen ab)
Frei von Verarbeitungsfehlern, da keine Verarbeitung stattfindet
Schwer visuell zu interpretieren
Riesige Dateigrösse (im Wesentlichen eine grosse Liste von Punkten + Attributen)
Schwierig effizient zu verarbeiten (keine expliziten Verbindungen zwischen Punkten)
Industriestandard für Engineering-Änderungen und Redesigns
Langsam zu generieren aus 3D-Scans (Punktwolken)
Verliert oft visuelle Details (Texturen, kleine Markierungen, Rost, Schmutz)
Scharfe Ergebnisse erfordern hohe Polygonzahlen, die für Webbrowser schwer sind
Risiko von „klumpiger" oder überglätteter Geometrie in komplexen Bereichen
Gaussian Splat
Fotorealistische visuelle Wiedergabetreue
Extrem schnell zu generieren
Einfach aus Fotos oder Videomaterial zu generieren
Handhabt dünne Strukturen gut (Kabel, Geländer, Zäune)
Nahezu sofortiger „Scan-to-View"-Workflow
Neuere Technologie (weniger Software-Unterstützung)
Keine „solide" Geometrie (eingeschränkt für Messungen wie Volumen)
Nicht geeignet für Physiksimulationen
Kann zu grossen Dateien führen, wenn nicht optimiert
Abbildung 10.1: Ursprüngliche Punktgrösse.Abbildung 10.2: Vergrösserte Punkte (3×).
Abbildung 11.1: Gerendertes Mesh-Modell, erstellt aus der Punktwolke.Abbildung 11.2: Gerendert + sichtbare Mesh-Dreiecke.
Abbildung 12: Auf halbem Weg zu Gaussian Splatting. Ohne optimierte Deckkraft- und Formparameter muss die Visualisierung ausschliesslich auf Punktfarbdaten zurückgreifen.
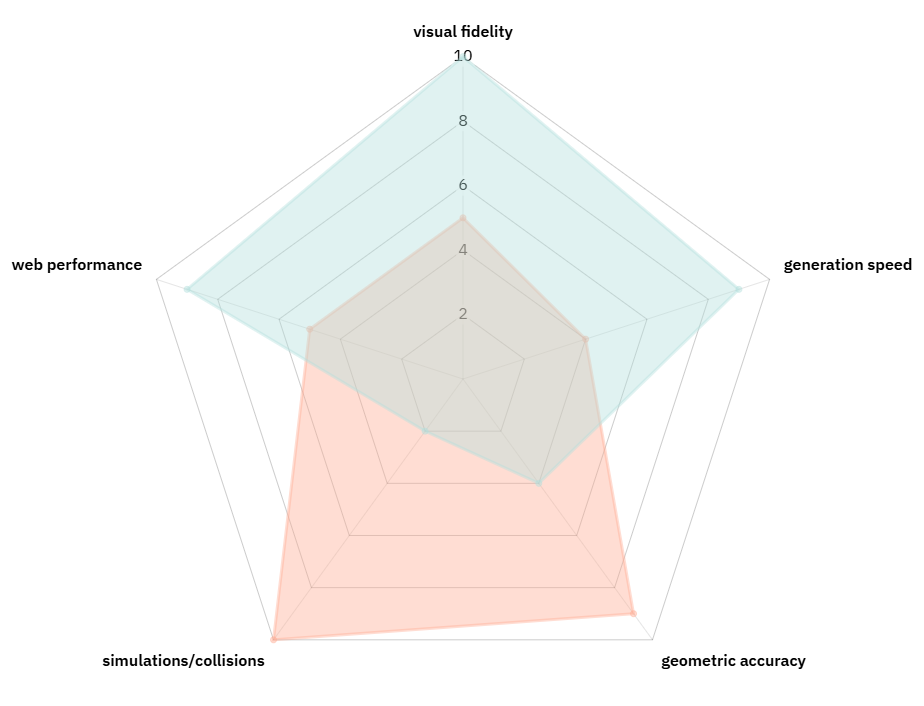
Abbildung 13: Grafischer Vergleich der Vor- und Nachteile von 3D-Meshes (rot) und Gaussian Splats (blau). Copyright ioLabs.
Ihre Vorteile – Gaussian Splat in ioFM
Gaussian Splatting kann die Hürde zur Erstellung einer nützlichen 3D-Vorschau erheblich senken. Anstatt dedizierte LiDAR-Scanner und aufwendige Nachbearbeitung zu benötigen, reicht oft ein einfaches Durchgangsvideo von einem Smartphone (oder einer Drohne für grössere Standorte) aus, um eine hochwertige Splat-Vorschau zu generieren. Das macht Reality Capture für Facility-Teams zugänglicher und einfacher über die Zeit zu wiederholen.
Für das ioFM-Erlebnis liegt der entscheidende Einfluss in Geschwindigkeit und visuellem Kontext. Schnellere Verarbeitung ermöglicht kürzere Upload-zu-Vorschau-Zyklen und flüssigere Web-Darstellung. Gleichzeitig liefern Splats einen realistischeren Eindruck vom aktuellen Zustand der Räume – Details, die Mesh-Modelle oft verfehlen. Da Aufnahme und Verarbeitung günstiger sind, werden regelmässige Aktualisierungen machbar, was hilft, die Vorschau mit der Realität in Einklang zu halten.
Die stärkste Richtung für ioFM ist ein hybrider Ansatz. Unser aktuelles Mesh dient als visuelles Overlay auf Minimal BIM, wobei präzise Geometrie Raumstruktur, Asset-Management und Berechnungen unterstützt. Gaussian Splats fügen eine hochauflösende visuelle Schicht für Navigation und Orientierung hinzu – und liefern das Beste aus beiden Welten: realistische Visualisierung mit geringer Datenkomplexität plus strukturierte Geometrie für FM-Workflows.
Fazit
Reality Capture bewegt sich in Richtung einfacherer, schnellerer und effektiverer Darstellungen. Anstatt jeden Scan durch schwere Meshing-Pipelines zu zwingen, können wir Formate wählen, die dem eigentlichen Zweck der 3D-Ansicht entsprechen. Für die tägliche Facility-Arbeit ist das Ziel oft nicht perfekte Engineering-Geometrie, sondern eine hochwertige, vertrauenswürdige visuelle Vorschau, die schnell lädt und im Browser flüssig bleibt.
Deshalb ist Gaussian Splatting eine so vielversprechende Richtung: Es liefert fotorealistischen Kontext mit exzellenter Performance und ermöglicht einen echten „Capture-to-View"-Workflow ohne Einbussen bei der UI-Reaktionsfähigkeit. Kurz gesagt geht es darum, das richtige Werkzeug für die Aufgabe zu nutzen – und für die Vorschau von Räumen und das Verständnis realer Bedingungen können Gaussian Splats ein deutlich überlegenes Erlebnis bieten.
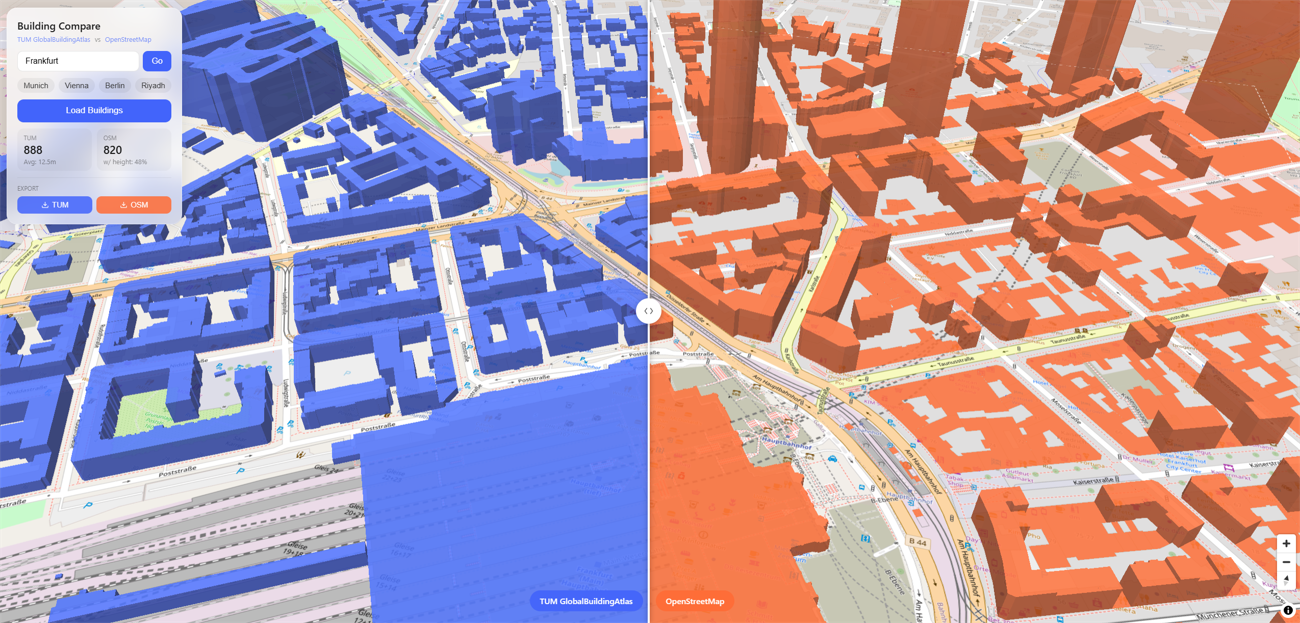
Spannende Neuigkeiten: Die TUM hat gerade den GlobalBuildingAtlas veröffentlicht – den ersten Open-Source-Datensatz mit 2,5D-Modellen ALLER 2,75 Milliarden Gebäude auf der Erde!
Mit Ihrer Zustimmung erlauben Sie uns, Cookies für die Bereitstellung von Diensten und Verkehrsanalysen zu verwenden.Weitere Informationen über die verwendeten Cookies und ihre Einstellungen.
Ich stimme zu
Denkst du darüber nach, unserem fantastischen Team beizutreten?
Das sind grossartigen Neuigkeiten! Um loszulegen, schicke uns bitte:
Deinen Lebenslauf
Dein bevorzugtes Startdatum
Deine Gehaltsvorstellungen
Sende alles per E-Mail an jobs@iolabs.ch. Wir melden uns mit den nächsten Schritten schneller, als du "You're hired!" sagen kannst!
Brauchst du noch etwas oder bist du bereit zum Plaudern?
Lass uns den Ball ins Rollen bringen und ein Treffen vereinbaren.